

Camera calibration method and achieving system of same
A technology for camera calibration and realization system, which is applied in the field of corresponding calibration of the image captured by the camera and the spatial position of the object. It can solve the problems of the theoretical error of the camera parameter calibration, the design of the camera lens does not meet the small hole imaging model, etc., and achieve fast and accurate camera calibration. , avoid the constraints of geometric conditions, the results are stable and accurate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific implementation of the present invention will be further described in detail below in conjunction with the accompanying drawings.
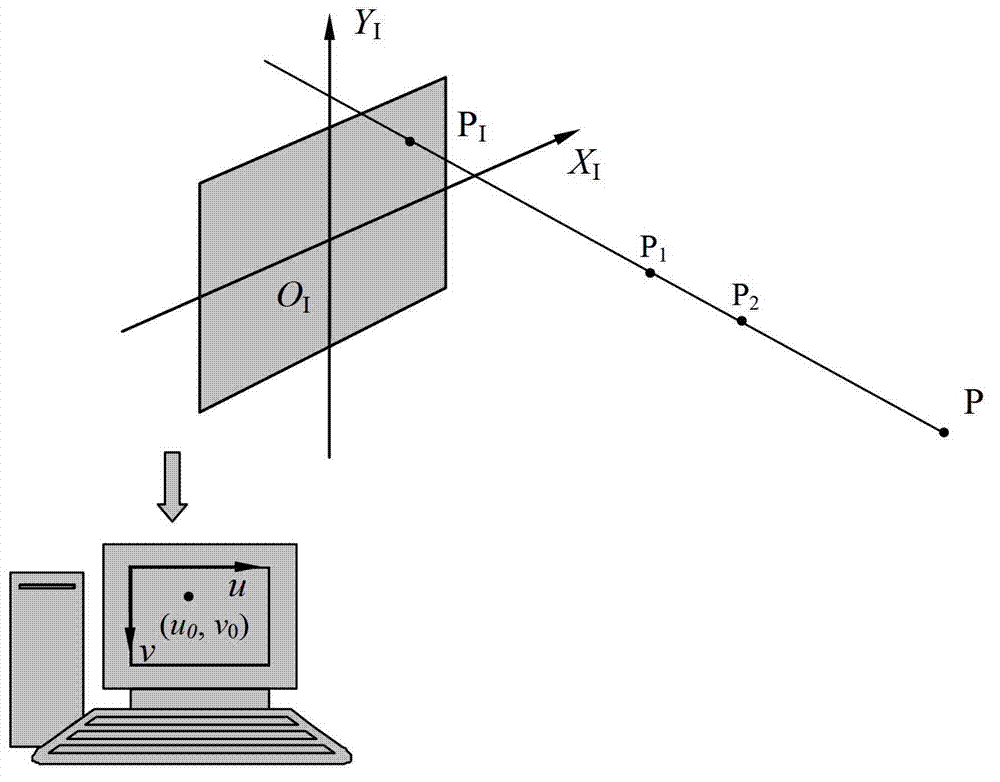
[0026] In the three-dimensional object image captured by the camera, each imaging point corresponds to a straight line in space, that is, the set of spatial points that can be imaged on a pixel of the camera is actually a straight line in space. Then, the spatial projection straight line corresponding to each pixel point in the camera is calibrated, that is, the position of the spatial perspective projection straight line corresponding to each pixel point is obtained, so as to realize camera calibration. The representation method of the pixel-corresponding spatial perspective projection straight line adopts the method of connecting two points. Such as figure 1 As shown, the space corresponding to each imaging point on the camera is a perspective projection straight line. In the process of calibration, a straight line in space c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More