

In-orbit calibration method of star sensor lens distortion and satellite attitude determination method based on starlight vector correction
A technology of lens distortion and star sensor, which is applied in the field of satellite attitude determination, can solve the problems of low precision and inability to calibrate the lens temperature distortion term of the star sensor, and achieves the effect of eliminating satellite attitude determination errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0040] Embodiment 1: The present invention corrects multiple star sensor lens distortions including temperature distortion coefficients by using the principle of equal star angle distance, and the method for on-orbit calibration of star sensor lens distortion based on starlight vector correction is carried out in the following steps :
[0041] Step 1. Calculate the derivative of the measured star angle distance between the i-th target star and the j-th target star to the lens distortion coefficient, the specific expression is as follows, where a is the lens distortion coefficient, x i 、x j 、y i 、y j are the x and y coordinates of the imaging points of the i-th target star and the j-th target star respectively, α i 、α j are the angles between the incident light of the i-th target star and the j-th target star and the optical axis of the lens,
[0042] ∂ ∂ a W i T ...
specific Embodiment approach 2
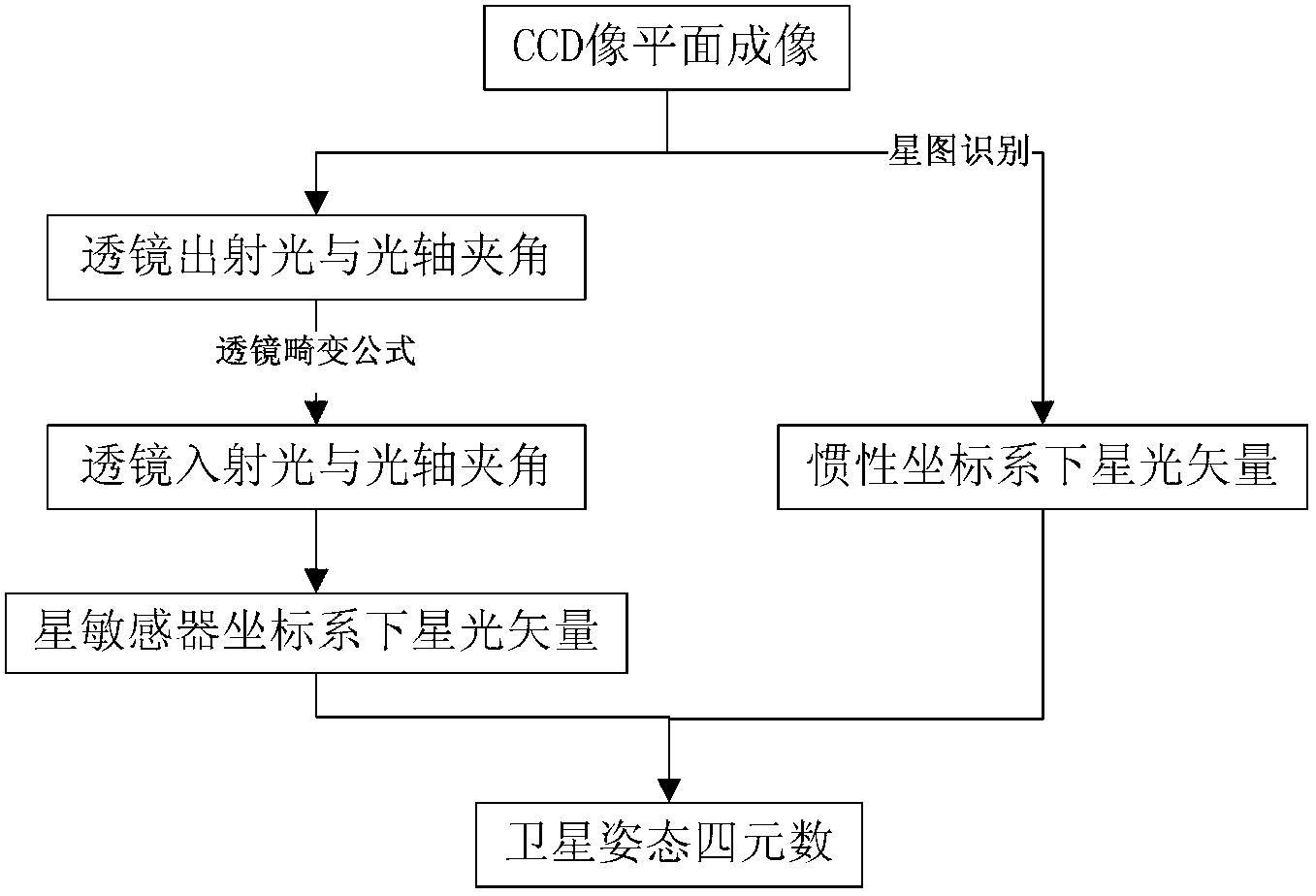
[0056] Specific implementation mode two: the present invention introduces a lens distortion model in the process of determining the target star starlight vector by the coordinates of the star sensor imaging point, and its process is shown in the appendix figure 1 , the satellite attitude determination method based on star sensor lens distortion proceeds in the following steps:
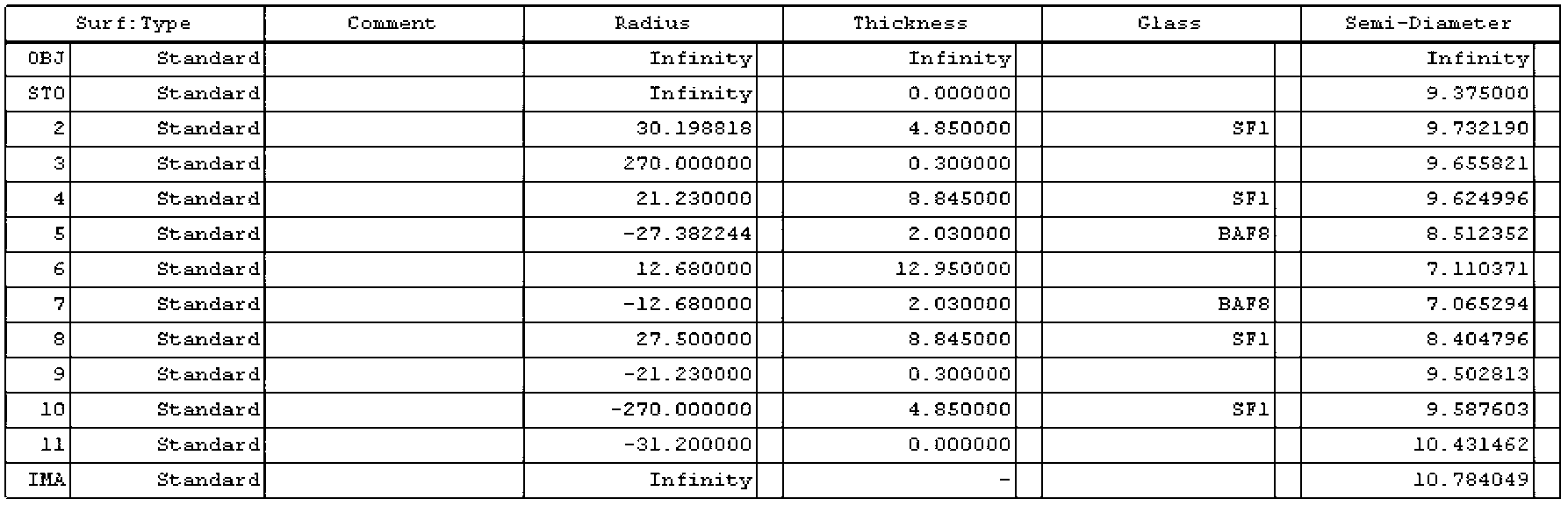
[0057] Step 1. The star sensor images the target star to obtain the coordinates (x, y, f) of the imaging point in the star sensor coordinate system, where x and y are the coordinates of the imaging point in the x and y directions respectively, and f is the star sensor The focal length of the device lens; the angle β between the outgoing light of the lens and the optical axis of the lens is obtained from the coordinates of the imaging point, and the specific calculation formula is:
[0058] β = arccos f x 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More