

Computing method of traction position correction of traction control system
A traction control system and correction calculation technology, applied in the field of traction systems, can solve the problems of untimely adjustment of the working state of the inverter, potential safety hazards, and the influence of safe and accurate transportation of items, and achieve low cost, few fault links, and high reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
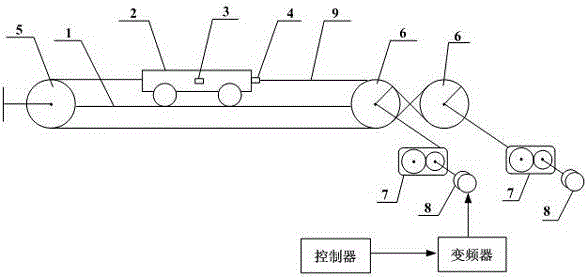
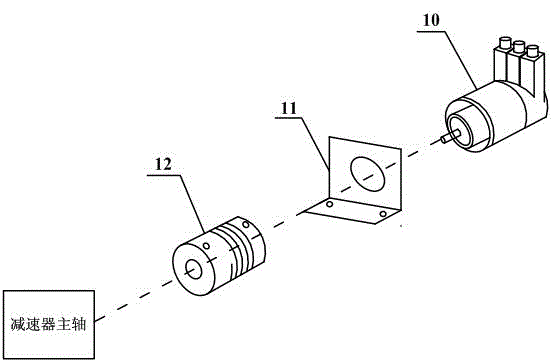
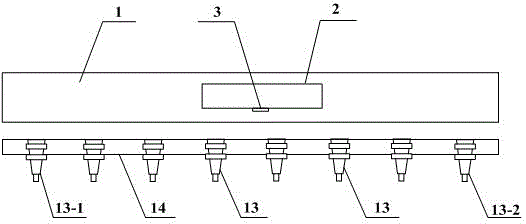
[0071] Example 1, assuming that the maximum detection distance of the multi-turn absolute rotary encoder 10 is L=8000 meters, the length of track 1 is M=350 meters, and the initial sampling position of the multi-turn absolute rotary encoder 10 at the starting point of track 1 Meter. Assuming that the orbital reciprocating vehicle 2 drives from the starting point of the track 1 to the end point, the rotary encoder 10 reverses, and the count value n gradually decreases, then:
[0072] ①When the orbital reciprocating vehicle 2 passes the i-th magnetic limit switch, the count value output by the rotary encoder 10 The sampling position corresponding to the zero value of the relative encoder count m, the orbital reciprocating vehicle 2 continues to move forward after passing the i-th magnetic limit switch, and the current output real-time count value n is relative to the sampling position corresponding to the zero value of the encoder count m, then first use the formula (2) to...
example 2
[0082] Example 2, assuming that the maximum detection distance of the multi-turn absolute value rotary encoder 10 is L=8000 meters, the length of track 1 is M=350 meters, and the initial sampling position of the multi-turn absolute value rotary encoder 10 at the starting point of track 1 Meter. Assuming that the orbital reciprocating vehicle 2 drives from the starting point of the track 1 to the end point, the rotary encoder 10 rotates forward, and the count value n gradually increases, then:
[0083] ①When the orbital reciprocating vehicle 2 passes the i-th magnetic limit switch, the count value output by the rotary encoder 10 The sampling position corresponding to the count zero value of the relative encoder m, the orbital reciprocating vehicle 2 continues to move forward after passing the i-th magnetic limit switch, and the current output real-time count value n is relative to the sampling position corresponding to the zero value of the encoder count m, then first use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More