

Pneumatic muscle driving bionic frog bouncing leg mechanism employing dual-joint mechanism form
A pneumatic muscle and double-joint technology, applied in the field of robotics, can solve the problems of complex structure, poor jumping ability, and inflexible movement, and achieve the effects of flexible movement, short contraction stroke, and simplified leg structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
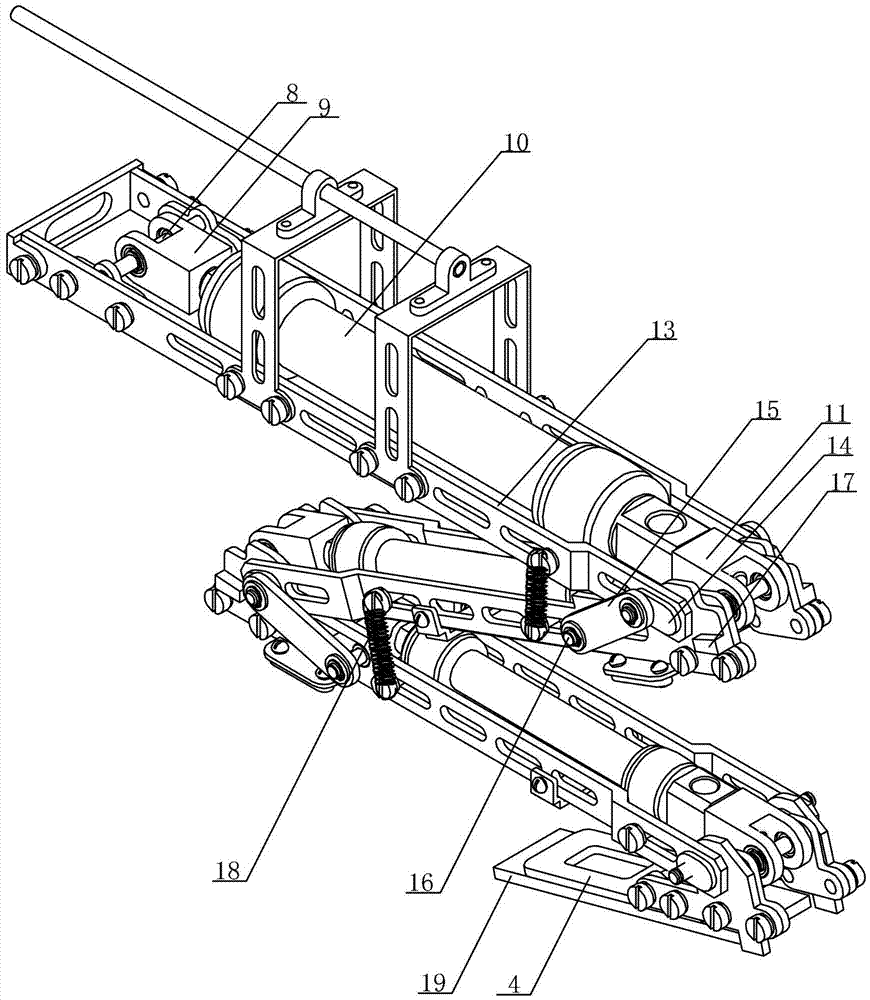
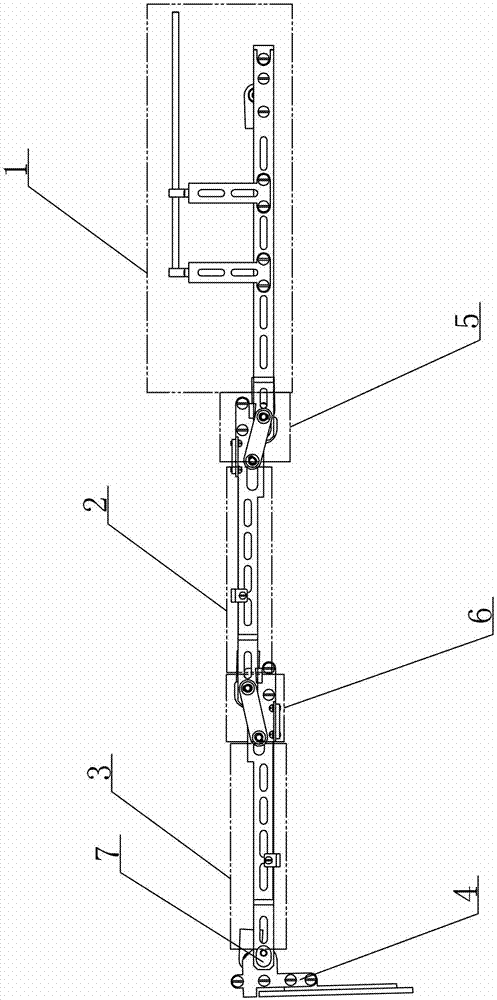
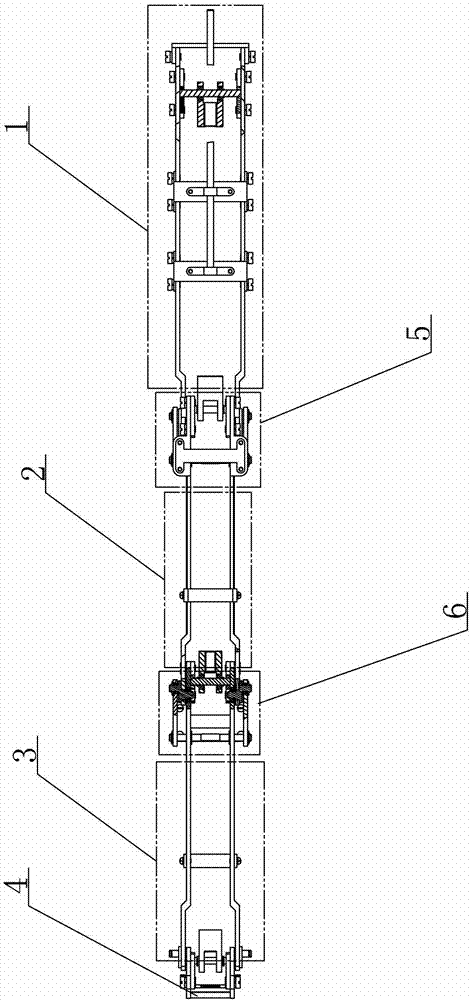
[0015] Specific implementation mode one: combine Figure 1-Figure 3 Describe this embodiment, the pneumatic muscle-driven imitation frog jumping leg mechanism in the form of a double-joint mechanism in this embodiment includes a trunk body 1, a thigh body 2, a calf body 3, a foot 4, a hip joint 5, a knee joint 6 and an ankle joint 7. The trunk body 1, thigh body 2 and calf body 3 all use pneumatic muscles as the drivers for joint extension, and the trunk body 1, thigh body 2, calf body 3 and foot 4 are connected through the hip joint 5 and knee joint respectively. 6 and the ankle joint 7 are rotatably connected, the trunk body 1, the thigh body 2 and the calf body 3 have the same structure, and the hip joint 5 and the knee joint 6 have the same structure.
[0016] The present invention is realized by connecting the muscle force points on the moving limbs of the two joints. Therefore, in addition to the muscle's own contraction, the driving stroke of the muscle also has the ov...
specific Embodiment approach 2
[0018] Specific implementation mode two: combination Figure 1-Figure 3 Describe this embodiment, the torso body 1 of this embodiment includes a first shaft 8, a first connecting member 9, a pneumatic muscle 10, a second connecting member 11, a second shaft 12 and a bracket 13, the first shaft 8 and the second shaft 12 are arranged on both sides of the bracket 13 respectively, and the two ends of the pneumatic muscle 10 are rotatably connected to the first shaft 8 and the second shaft 12 through the first connecting piece 9 and the second connecting piece 11 respectively. So set, the structure is simple. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0019] Specific implementation mode three: combination Figure 1-Figure 3 Describe this embodiment, the length and diameter of the pneumatic muscle 10 of the thigh body 2 and the pneumatic muscle 10 of the calf body 3 of this embodiment are smaller than the length and diameter of the pneumatic muscle 10 of the trunk body 1 . With this setup, the power and retraction travel is greater. Other compositions and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More