

Accurate part positioning method based on binocular microscopy stereo vision
A stereo vision, precise positioning technology, applied in image data processing, instruments, calculations, etc., can solve the problems of small area of the part to be tested, non-contact, small target area to be measured, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
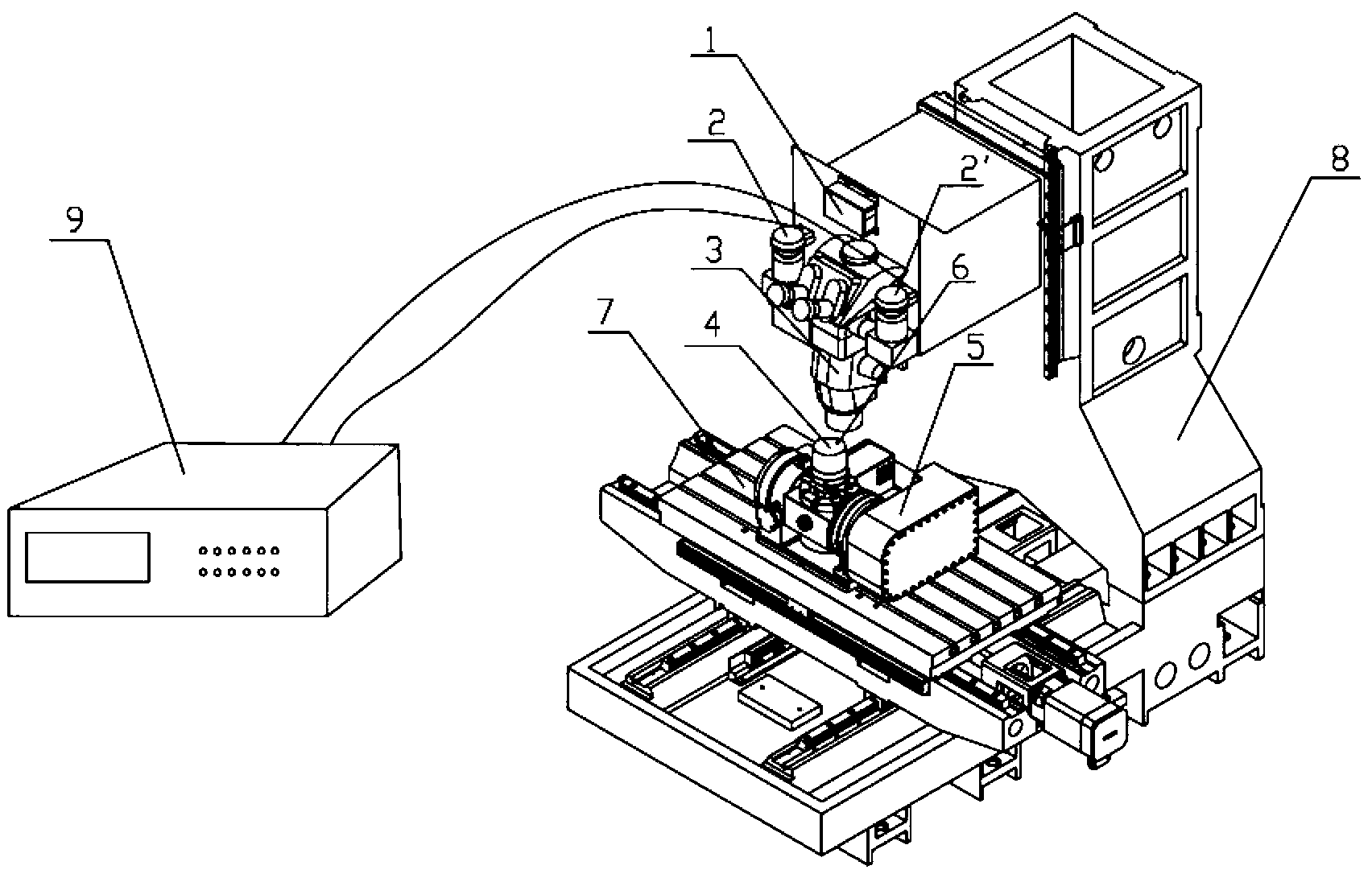
[0064] The specific embodiments of the present invention will be described in detail below in conjunction with the technical solution and the drawings. Attached figure 1 It is a device model diagram of precise parts positioning based on binocular microscopic stereo vision. The device collects the position information of the area to be measured in the workpiece to be measured through the left and right CCD cameras 2, 2', and finds the three-dimensional space coordinates of the point to be measured through the relationship between the established image coordinate system and the world coordinate system. Realize precise positioning. The installation method of the device is as follows: the machine bed 8 is placed on the ground; the precision numerical control displacement platform 7 is installed with the machine bed through the guide rail, which can meet the high-precision translation and angle rotation requirements of the checkerboard calibration plate in the calibration experimen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More