

A method and device for hand-eye calibration of a robotic arm based on three-dimensional object recognition
A technology for hand-eye calibration and three-dimensional objects, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as harsh environmental requirements, complicated steps of calibration methods, and inaccurateness, and achieve simple steps, strong operability, and overcoming precision low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention provides a method and device for manipulator hand-eye calibration based on three-dimensional object recognition. In order to make the purpose, technical solution and effect of the present invention clearer and clearer, the present invention will be further described in detail below. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
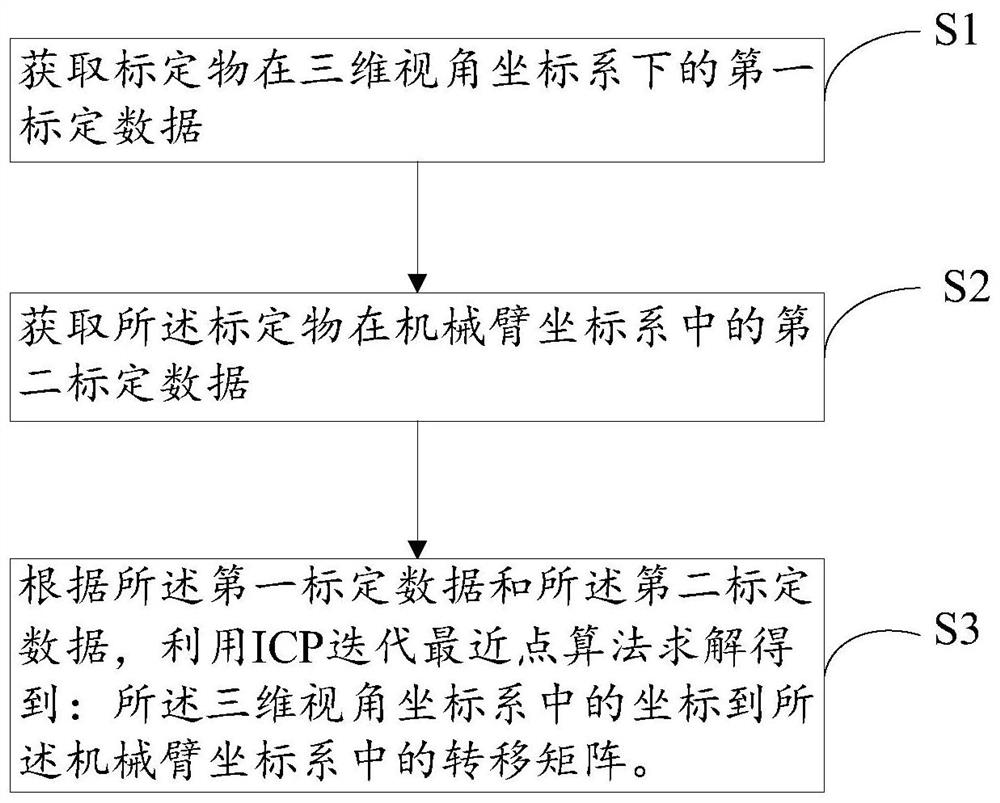
[0038] The present invention provides a preferred embodiment of a hand-eye calibration method based on three-dimensional object recognition, such as figure 1 shown, including:
[0039] Step S1. Obtain the first calibration data of the calibration object in the three-dimensional viewing angle coordinate system.
[0040] The existing technology is to use two-dimensional vision to extract and match the features of the checkerboard to obtain the coordinate relationship between the manipulator and the camera. This calibra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More