

Intraoperative camera calibration for endoscopic surgery
A technology of endoscope and camera, applied in the field of real-time tracking of surgical tools
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
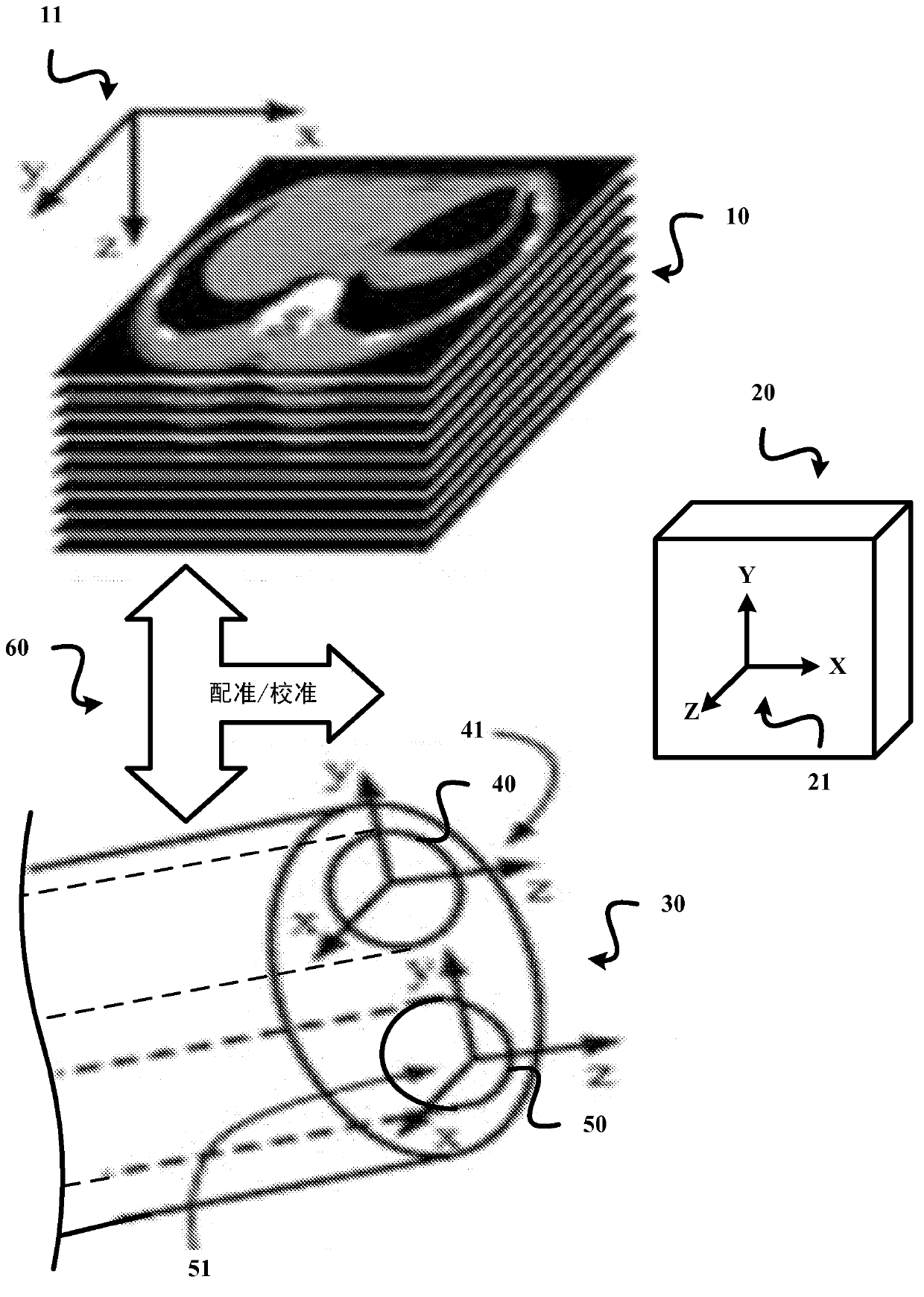
[0021] refer to figure 1 , the present invention is premised on a technique 60 for performing both image registration and tracker / camera calibration during an intervention involving an endoscope 30 . This registration / calibration technique 60 is based on the idea that the offset distance between the video frame from the endoscopic camera 50 and the tracked frame from the EM tracker 40 is determined by the anatomical region acquired from the endoscopic camera 50 ( For example, inconsistencies in two-dimensional ("2D") projection images between an endoscopic image of the lungs) and a virtual flythrough of image frames of the pre-operative scan image 10 of the anatomical region are reflected. Thus, the registration / calibration technique 60 has the ability to distinguish such spatial differences, and the reconstructed spatial correspondence is used to estimate a calibration matrix between the EM tracking coordinate system 41 and the endoscopic camera coordinate system 51 .
[002...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More