

Modularized fiber-optic gyroscopic compass
A fiber optic gyroscope and compass technology, which is applied in the field of fiber optic gyroscope north-finding devices, can solve the problems of fast north-seeking speed, long time for north-finding devices, and low cost, and achieve lower accuracy requirements, improved north-finding accuracy, and easy adjustment flat effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
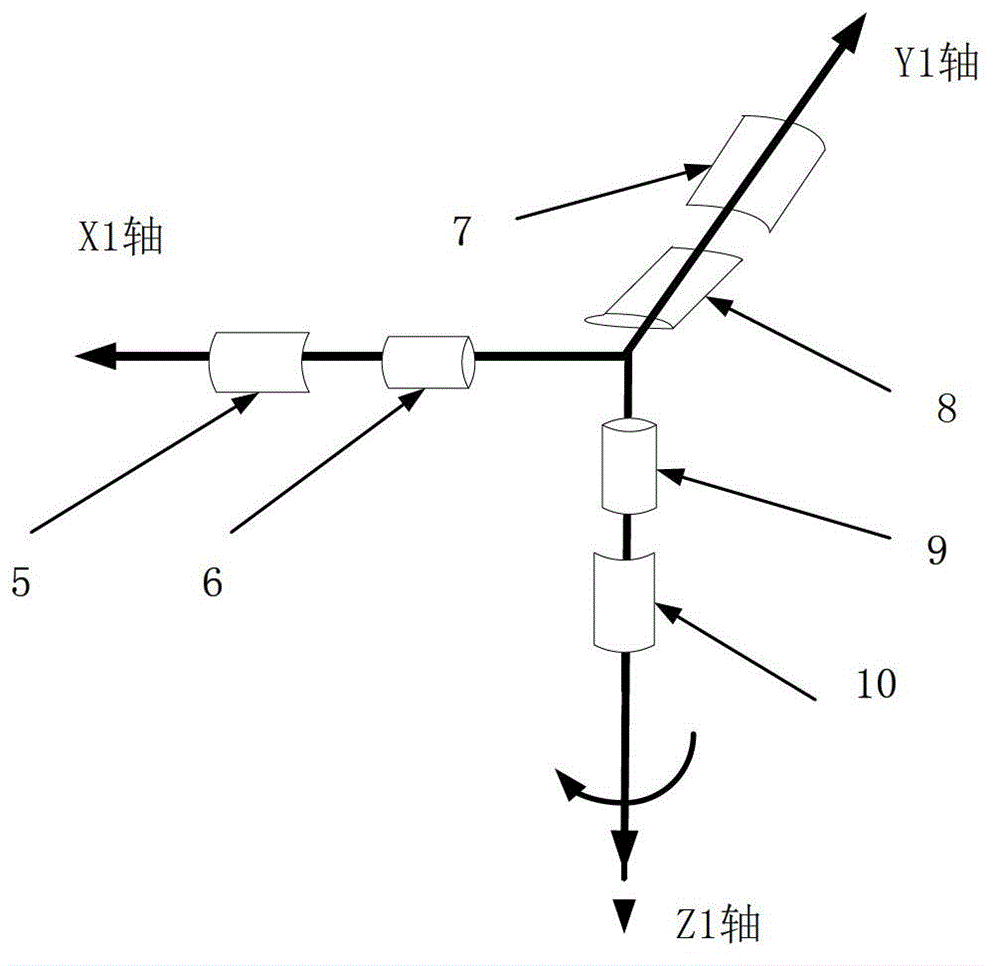
[0034] Such as figure 2 As shown in , there are three fiber optic gyroscopes and accelerometers in this embodiment, and one fiber optic gyroscope and accelerometer is arranged on each coordinate axis orientation of the space coordinate system. Specifically, fiber optic gyroscopes 5 , 7 , and 9 and quartz accelerometers 6 , 8 , and 10 are respectively installed on the three coordinate axes X1 , Y1 , and Z1 of the space coordinate system. In this configuration mode, it can be sensitive to the angular velocity and acceleration signals of the X1, Y1, and Z1 axes, that is, it can be sensitive to the angular velocity and acceleration information of the 3-dimensional space in real time.
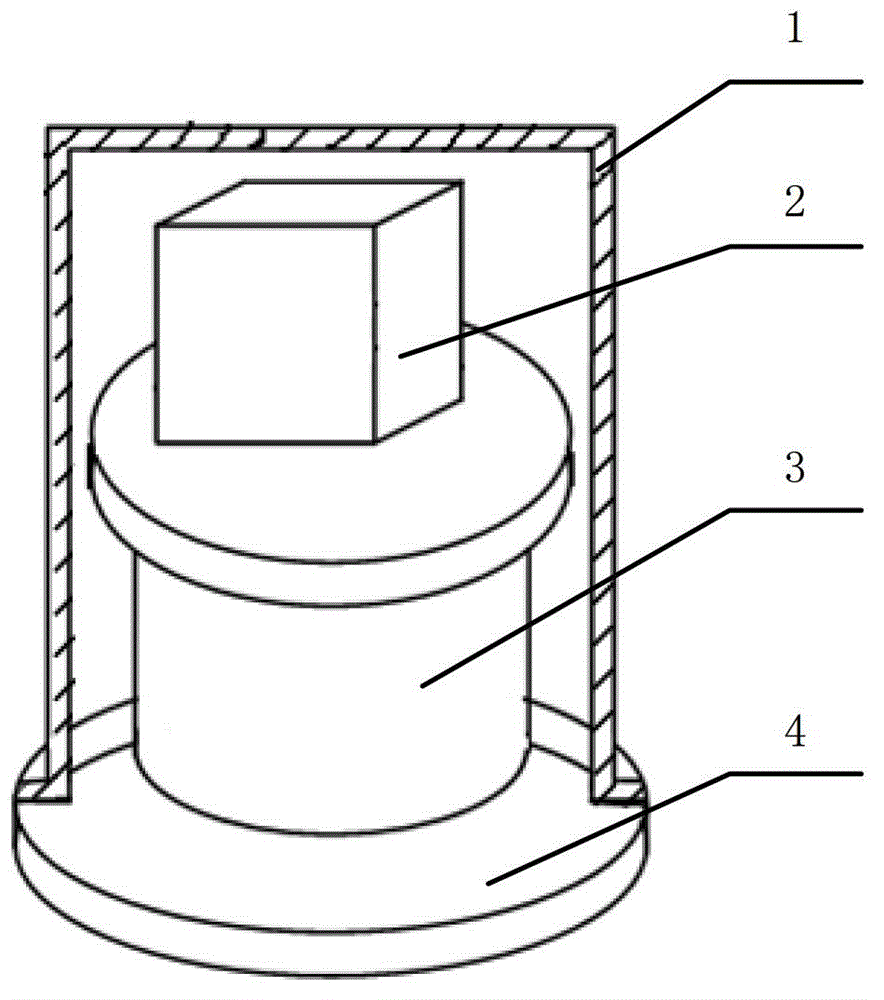
[0035] When starting to work, the indexing control mechanism 3 returns to the zero position and locks at the 0° position, and the inertial group 2 collects data for a certain period of time, such as 1min to 8min; after that, the indexing control mechanism turns to the 180° position and locks, and t...
Embodiment 2
[0037]In this embodiment, there are two fiber optic gyroscopes, which are respectively arranged on two directions perpendicular to the rotation axis of the three coordinate axis directions of the space coordinate system, and three accelerometers, which are respectively arranged at the directions of each coordinate axis of the space coordinate system superior. Specifically, two fiber optic gyroscopes 5, 7 are installed on the coordinate axes X1, Y1 of the space coordinate system, and three quartz accelerometers 6, 8, 10 are installed on the X1, Y1, Z1 axes. In this configuration mode, it can be sensitive to the angular velocity signals on the X1 and Y1 axes, and the acceleration signals on the X1, Y1, and Z1 axes, that is, it can be sensitive to the angular velocity information in the rotation plane and the acceleration information in the 3-dimensional space in real time.
[0038] When working, the compass first remains in a static state, and then the indexing control mechanism...
Embodiment 3
[0040] In this embodiment, there is one fiber optic gyroscope, which is set on any coordinate axis orientation perpendicular to the rotation axis. on the coordinate axis. Specifically, an optical fiber gyroscope 5 is installed on the X1 axis, and a quartz accelerometer 6 and 10 are respectively installed on the X1 axis and the Z1 axis. Of course, the fiber optic gyroscope can also be installed on other axes, and the corresponding accelerometer can also be installed on other coordinate axis orientations. In this configuration mode, the angular velocity signal on the X1 axis and the acceleration signal on the X1 and Z1 axes can be sensitive.
[0041] When working, the compass first remains in a static state, and then the indexing control mechanism returns to the zero position and locks at the 0° position. The inertial group 2 is still for data collection, and the time can be, for example, 1 minute. Then the indexing control mechanism is forwarded to the 90° position and locked...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More