

Robot driving structure
A driving structure and robot technology, applied in the field of machinery, can solve problems such as difficulty in making great breakthroughs in the working radius and load capacity of the robot driving structure, limiting the load capacity and working radius of the robot driving structure, and affecting the positioning accuracy of the robot driving structure. The effect of low structural strength, reduced self-weight, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The core of the present invention is to provide a robot driving structure, which can significantly improve its working radius and working precision with less energy consumption.
[0020] In order to enable those skilled in the art to better understand the solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
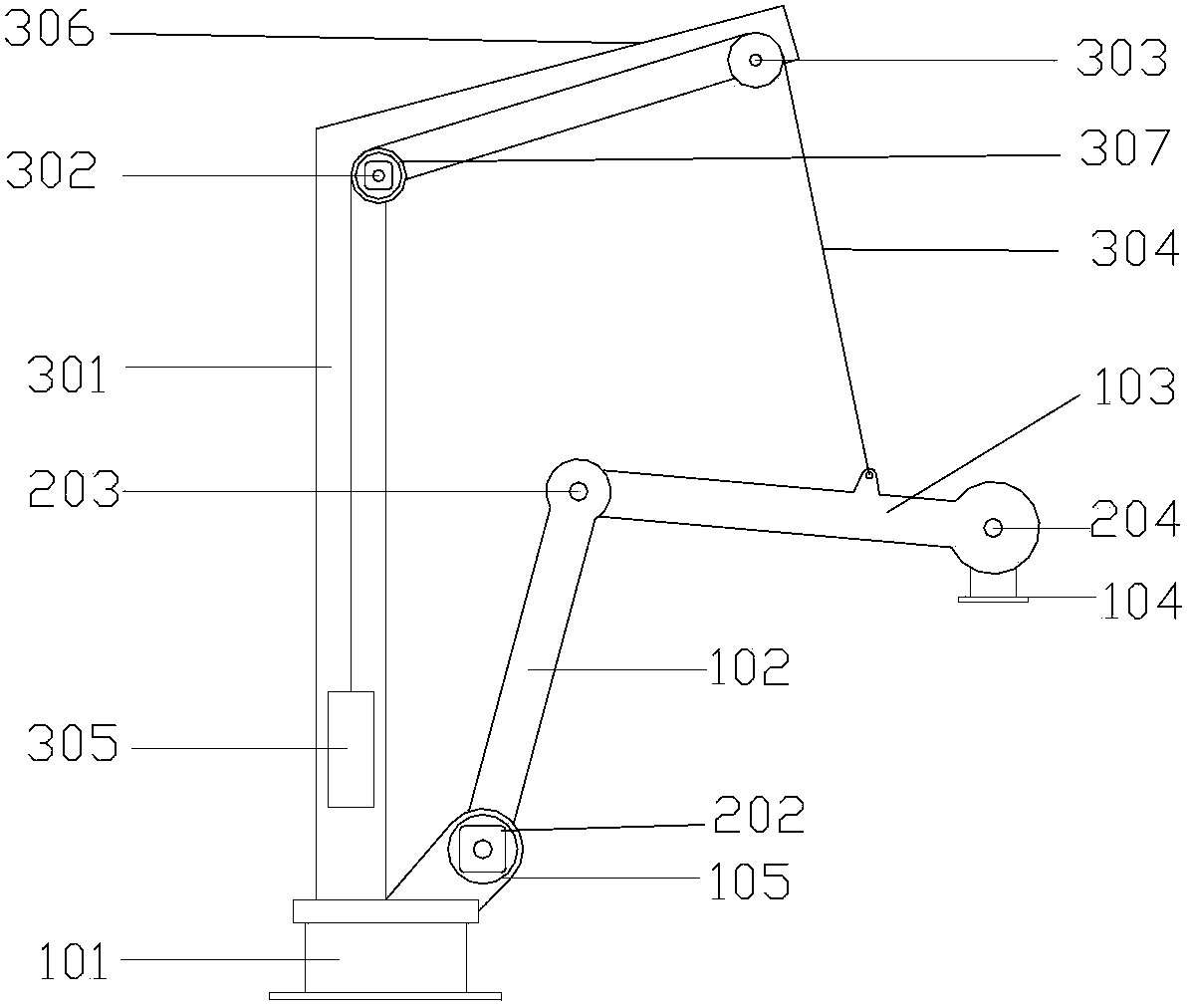
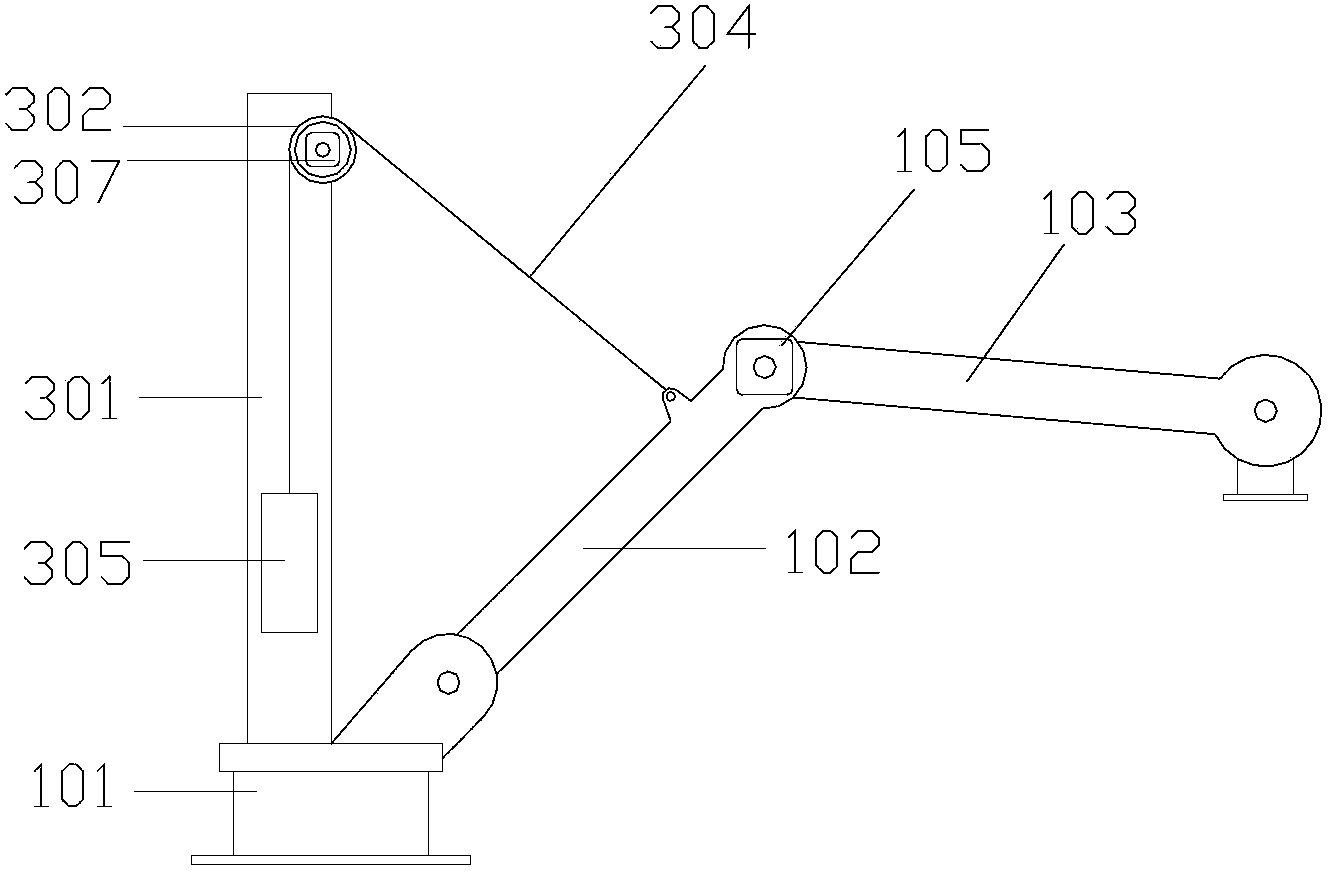
[0021] Please refer to figure 2 , figure 2 It is a structural schematic diagram of a specific embodiment of the robot driving structure provided by the present invention.
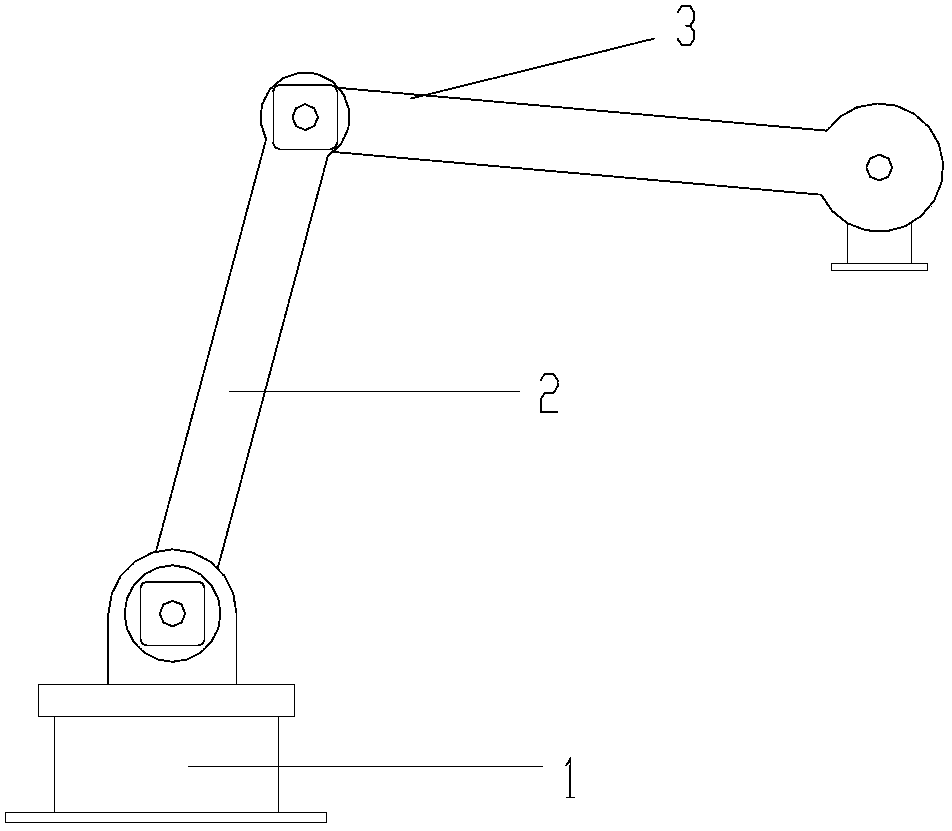
[0022] The existing robot drive structure generally includes a base 101 and a mechanical arm pivotally mounted on the base 101 .
[0023] Wherein, the mechanical arm includes a first joint arm 102 , a second joint arm 103 and a third joint arm 104 which are sequentially connected to each other. Usually, the self-rotating axis of the base is called the first axis (not shown ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More