

Automatic carrying clamp hand assembly
A gripper and assembly technology, applied in the field of manipulators, can solve problems such as large stroke and swing space, complex gas path control structure, and large assembly rotation radius, and achieve short rotation switching time, save action stroke time, and lighten the structure. The effect of intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The structure of the gripper assembly applying the technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
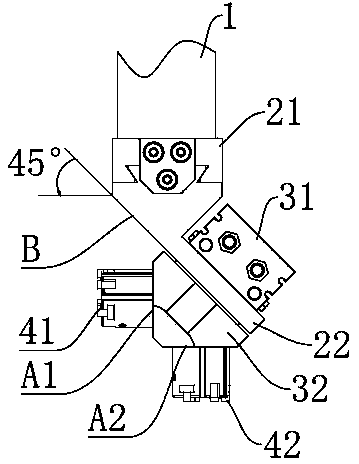
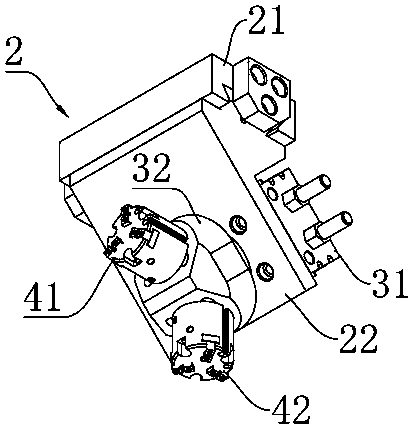
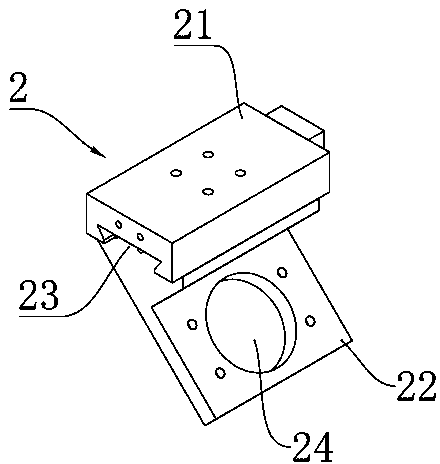
[0035] Such as figure 1 , figure 2 with image 3 As shown, an automatic handling gripper assembly that can be used in conjunction with a machining center includes a support frame 2 that can be installed on a transport arm 1 and a rotary driver installed on the support frame 2 . The machining center is a device capable of processing mechanical parts, such as a machine tool, and the automatic handling gripper assembly mainly provides the machining center with workpieces to be processed and removes processed workpieces. The machining centers each have a gripper that can grip a workpiece, for which purpose the gripper itself also has a gripping axis.
[0036] Wherein the carrying arm 1 is a component capable of reciprocating movement and driving the gripper assembly to at least move up and down, l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More