

Control method of two-wheeled self-balance vehicle
A technology of self-balancing vehicles and control methods, which is applied to bicycles, attitude control, motor vehicles, etc., can solve the problems of high risk and long time for balance correction of drive motors, and achieve the effect of reducing risks and short time for balance correction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the accompanying drawings of the description.
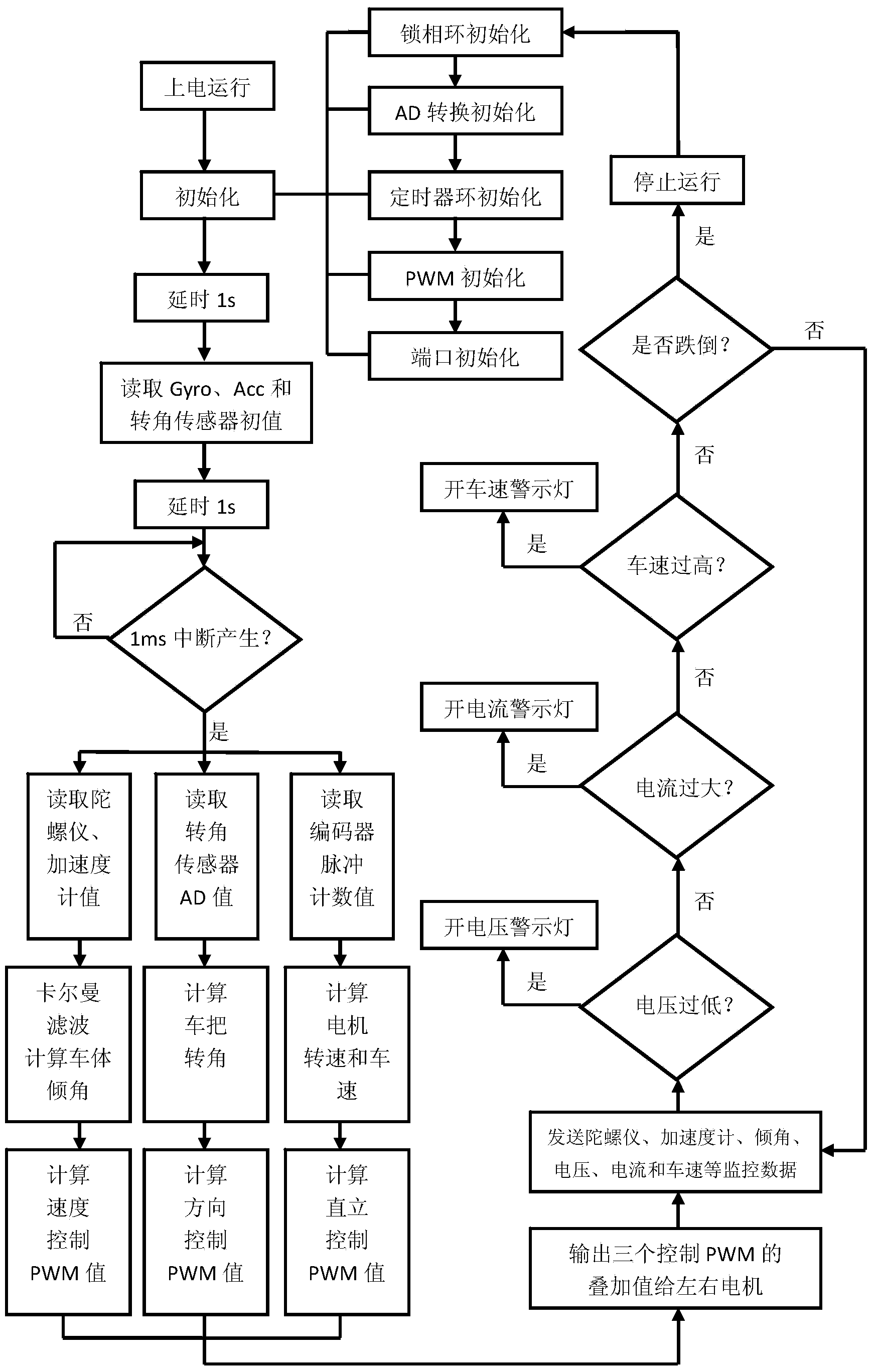
[0016] Such as figure 1 As shown, a two-wheeled self-balancing vehicle control method includes the following steps:
[0017] (1) After the two-wheel self-balancing vehicle is powered on and running, the system first enters various initialization procedures, including phase-locked loop initialization, AD conversion initialization, timer initialization, PWM initialization and port initialization;
[0018] (2) Then wait for the system to stabilize after a delay of 1s, then read the initial values of the gyroscope, accelerometer and angle sensor, and then wait for a parameter change with a delay of 1s;
[0019] (3) The program sets a 1ms interrupt function, and the upright control, direction control and speed control are all carried out simultaneously during the period; when the 1ms interrupt occurs, the values of the gyroscope, accelerometer, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More