

Six-axis bending robot
A robot and six-axis technology, applied in the field of mechanical processing, can solve the problems of inflexible movement, low processing efficiency, and limited activity space for grasping and transporting small pieces of sheet metal, and achieve the effect of improving processing efficiency and flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
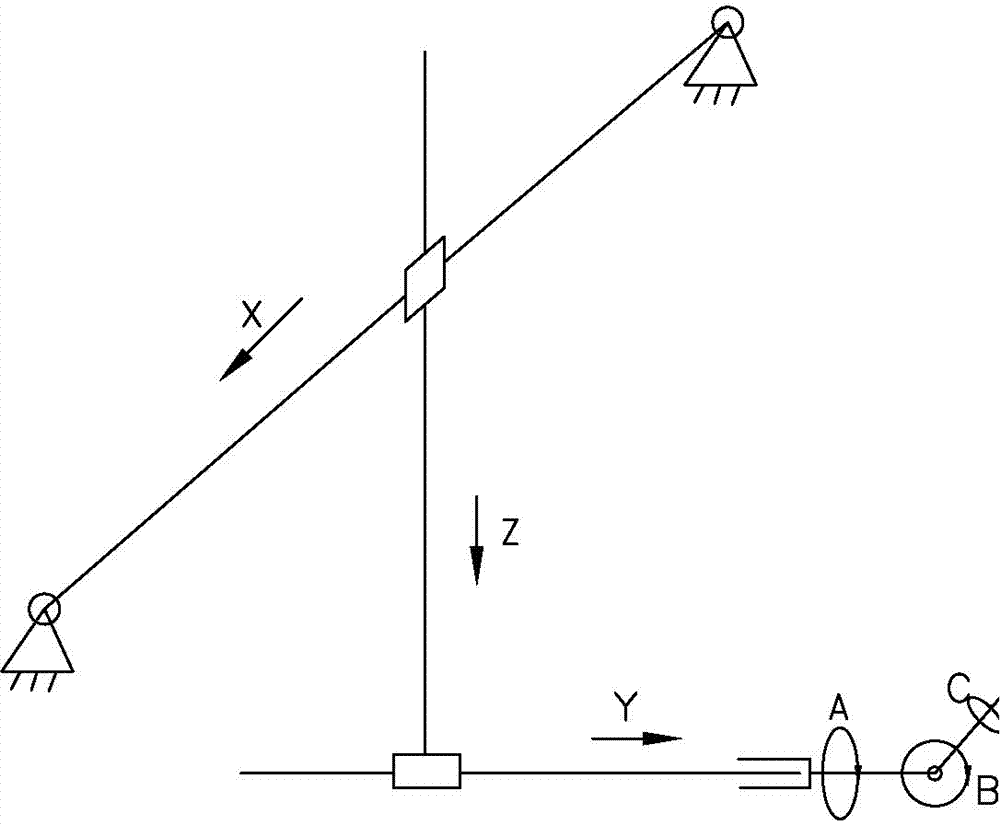
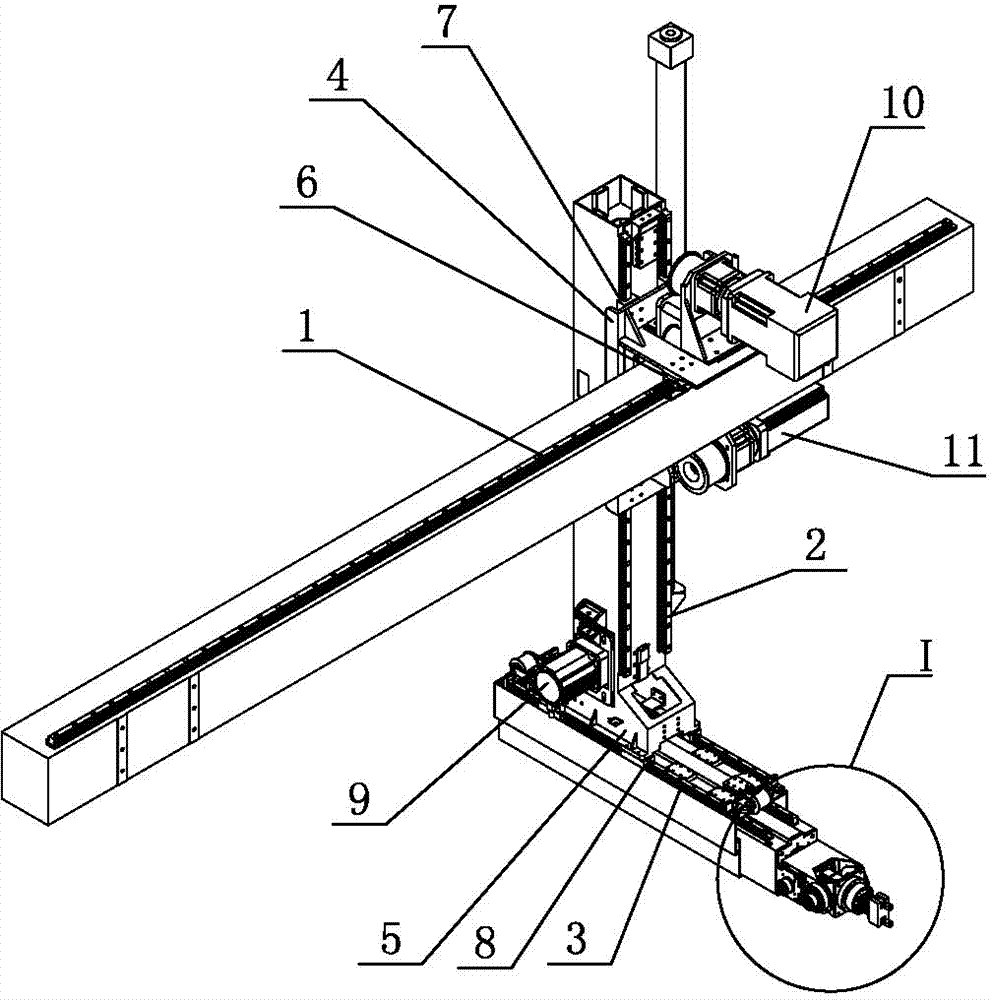
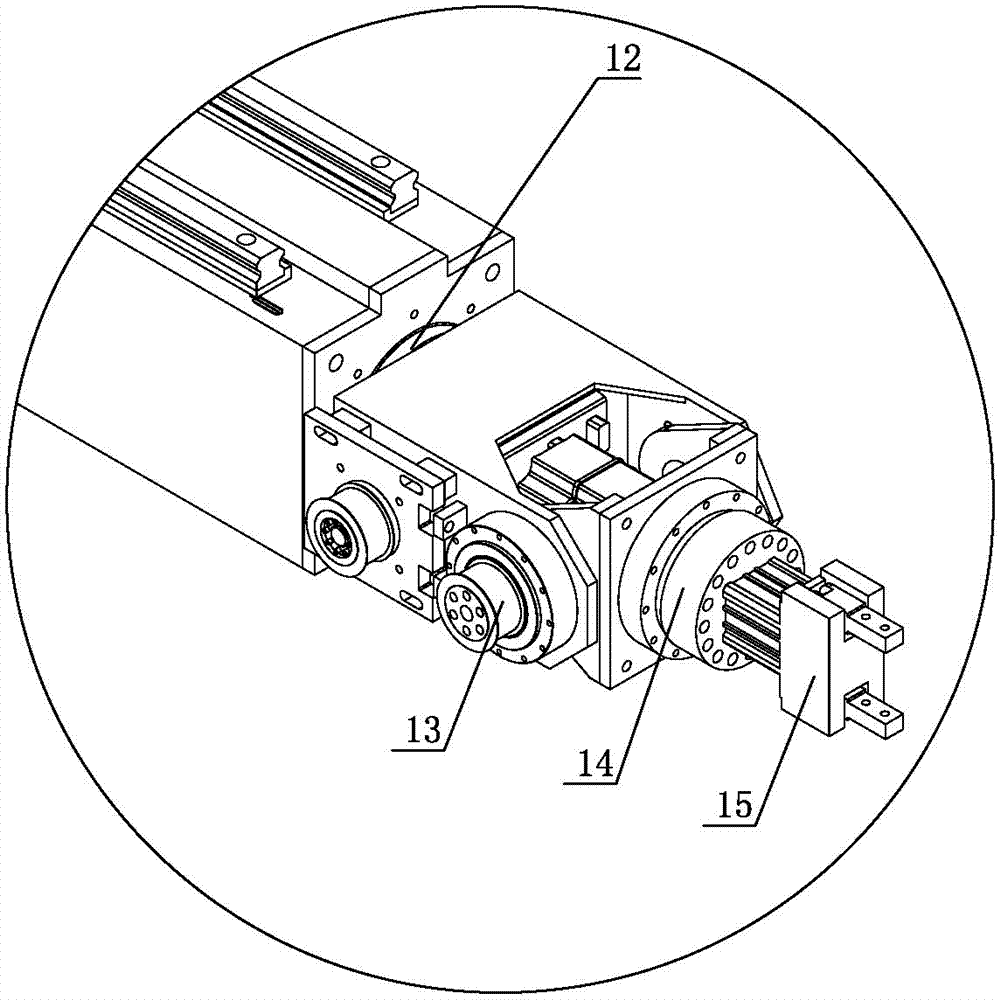
[0027] Such as figure 1 — Figure 6 Shown is the six-axis bending robot of the present invention, including X-axis guide rail 1, Y-axis guide rail 3 and Z-axis guide rail 2 perpendicular to each other, X-axis guide rail 1 is fixedly connected to the body, X-axis guide rail 1 and Z-axis guide rail 2 Through the vertical connection of the slider one 4, the slider one 4 is respectively provided with the X-axis slider guide rail 6 and the Z-axis slider guide rail 7 which are relatively slidingly connected with the X-axis guide rail 1 and the Z-axis guide rail 2, and the lower end of the Z-axis guide rail 2 is fixed. A slider two 5 is provided, and a Y-axis slider guide rail 8 that is slidingly connected to the Y-axis guide rail 3 is fixed on the slider two 5. The front end of the Y-axis guide rail 3 is rotatably connected to the A-axis 12, and the A-axis 12 is rotatably connected to the A-axis 12. The A shaft 12 is perpendicular to the B shaft 13, and the B shaft 13 is rotatably...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More