

Motion Estimation Method Based on 3D Vision System Image Features and 3D Information
A 3D vision and motion estimation technology, applied in the field of motion estimation, can solve the problems of the influence of the initial value of the 3D estimation, the inability to obtain the 3D relative estimation, and the failure of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
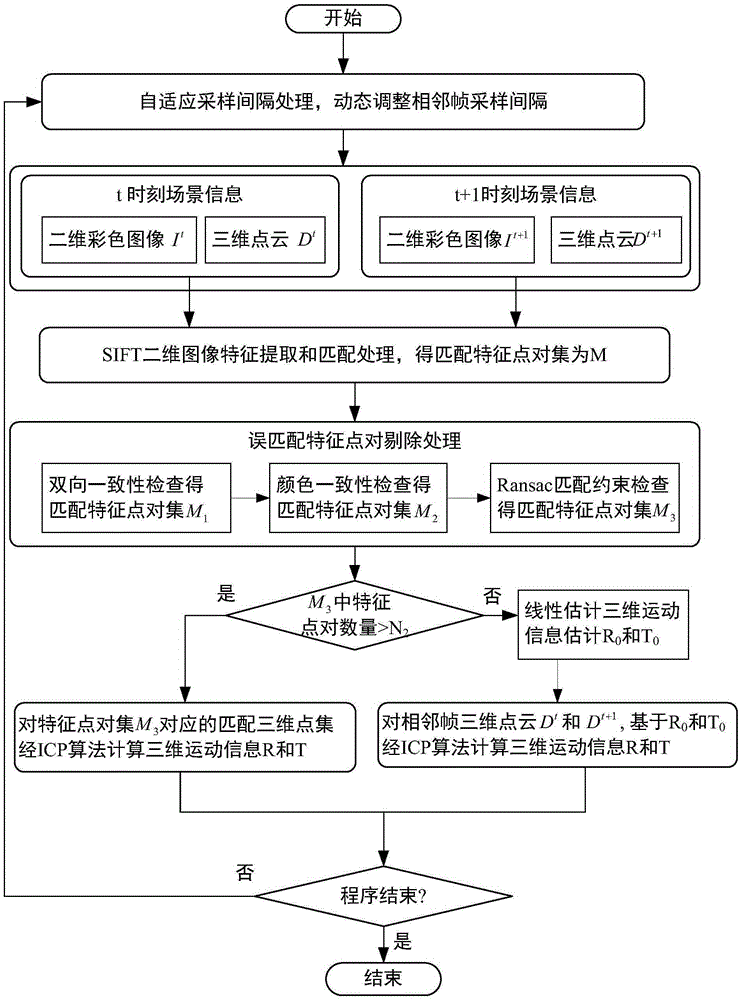
[0061] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0062] The 3D vision system involved in the present invention can adopt the 2D / 3D compound camera or Microsoft Kinect 3D camera etc. involved in the invention patent (201310220879.6). The three-dimensional vision system can simultaneously acquire scene two-dimensional color image information I and spatial three-dimensional information D, wherein the two-dimensional color image information I and spatial three-dimensional information D are matched and corresponded one by one according to the pixel coordinates of the two-dimensional color image, that is, the two-dimensional color image I The pixel point I(u,v) and the three-dimensional point cloud D of the uth row and the vth column in u,v (x, y, z) correspond. As an application example, the present invention provides the application effect based on the Kinect three-dimensional camera.
[0063] Such as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More