

Fuzzy nerve network control method for automobile driving robot system
A technology of fuzzy neural network and robot system, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as large fluctuations in vehicle speed, poor anti-interference ability, and difficult online adjustment of regulator parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
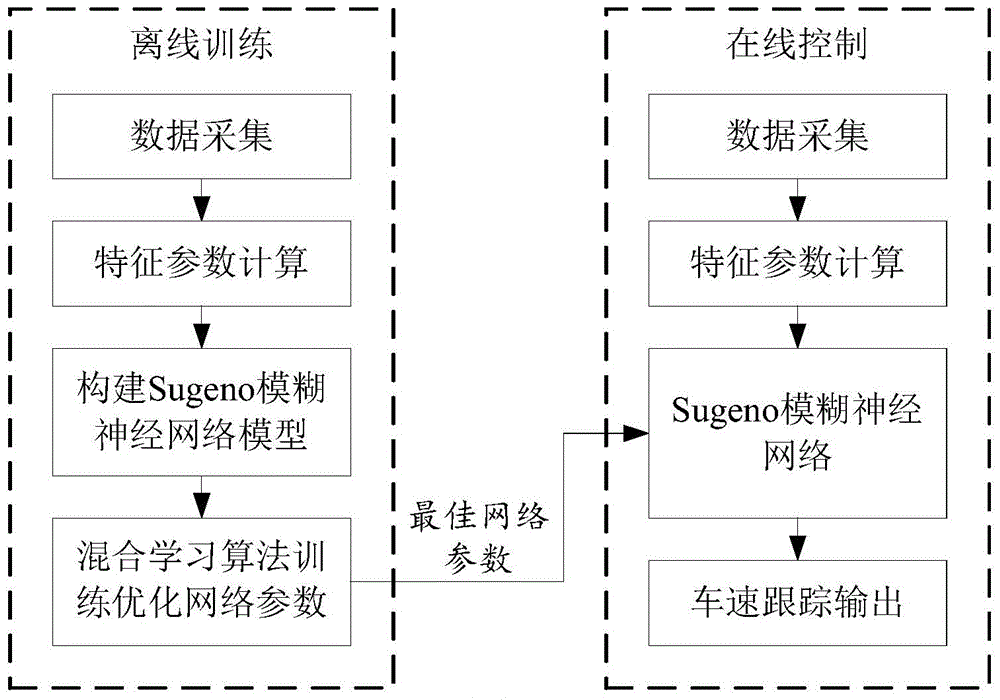
[0057] Such as figure 1 As shown, according to a preferred embodiment of the present invention, a fuzzy neural network control method of a car driving robot system is realized through two stages, namely: an offline training stage and an online control stage, and the offline training stage is used to construct a fuzzy neural network. Network and determine the optimal network parameters for online control through offline training. In the online control stage, according to the optimal network parameters after training and the characteristic parameters of the car driving robot calculated in real time, they are substituted into the Sugeno fuzzy neural network for the car driving robot system. Car speed tracking precise control. The implementation of the above two stages in this embodiment will be descr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More