

Novel ground condition adaptation type bouncing power leg of hopping robot
An adaptable and robotic technology, applied in the field of jumping robots, can solve the problems of the jumping height of the robot that affects the conversion rate of energy, the power legs cannot touch the ground, and the utilization rate of spring energy is low, and achieves compact structure, convenient control, and high jumping height high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the drawings and specific embodiments.
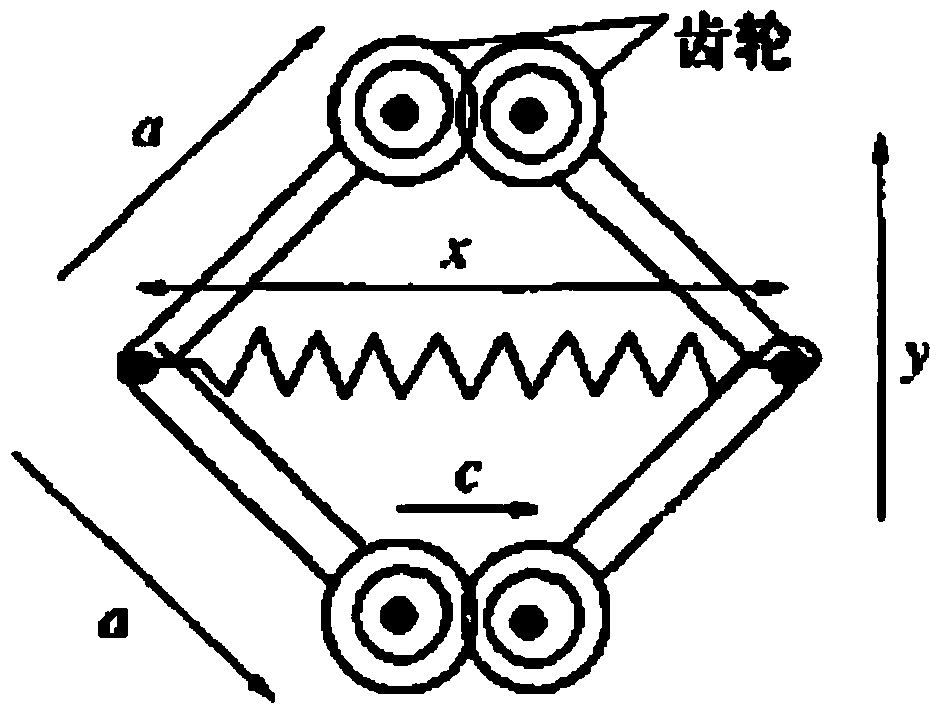
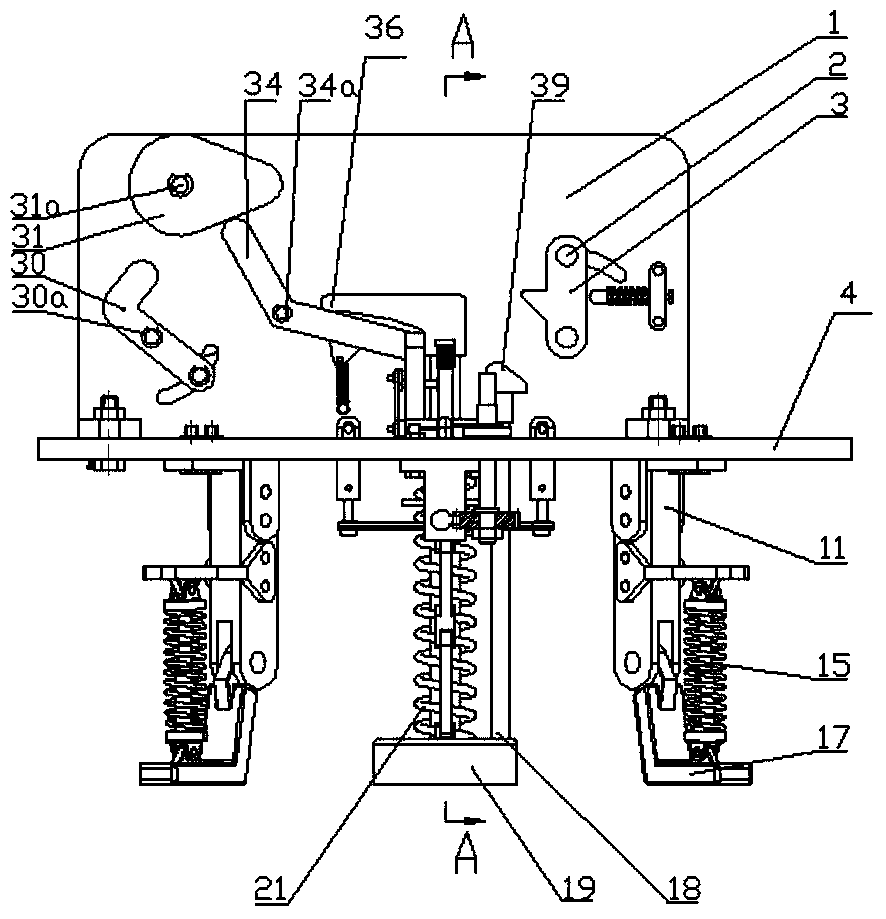
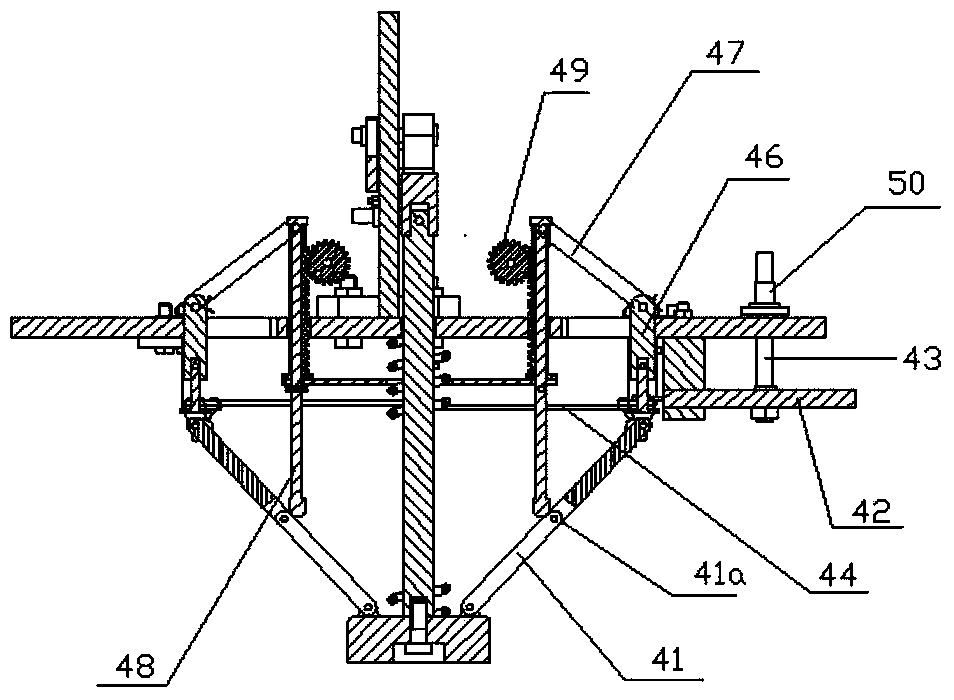
[0030] The bounce power leg of the new terrain adaptive jumping robot mainly includes power spring 21, dead-point push rod guide sleeve, dead-point push rod 48, foot spring 15, kick foot 19, support plate 4, gear a, rack a, Gear b, rack b, parallelogram mechanism 44, etc.
[0031] See Figure 2-9 , A new type of terrain-adaptive jumping robot, including a horizontal support plate 4, below which is fixed 3-4 support legs, the center of the support plate 4 is provided with a bounce leg, the bounce leg includes a kick 19 , The upper part of the pedal 19 is connected with the spring guide post and the tripping rod 18. The spring guide post is sheathed with a power spring 21. The lower end of the power spring presses the pedal 19, and the upper end abuts the support plate 4, and the upper end of the tripping rod 18 is provided with The tripping contact 39, the upper...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More