

Input method of three-dimensional inertia remote control device and three-dimensional inertia remote control device
A remote control device and input method technology, applied in the input/output process of data processing, instruments, electrical digital data processing, etc., can solve problems such as easy confusion, wrong instructions, and narrow application range, so as to achieve simple and convenient use and reduce complexity degree, the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] In this embodiment, the fixed pointing is directly ahead relative to the reference pointing as an example, and the volume is controlled by remote control.
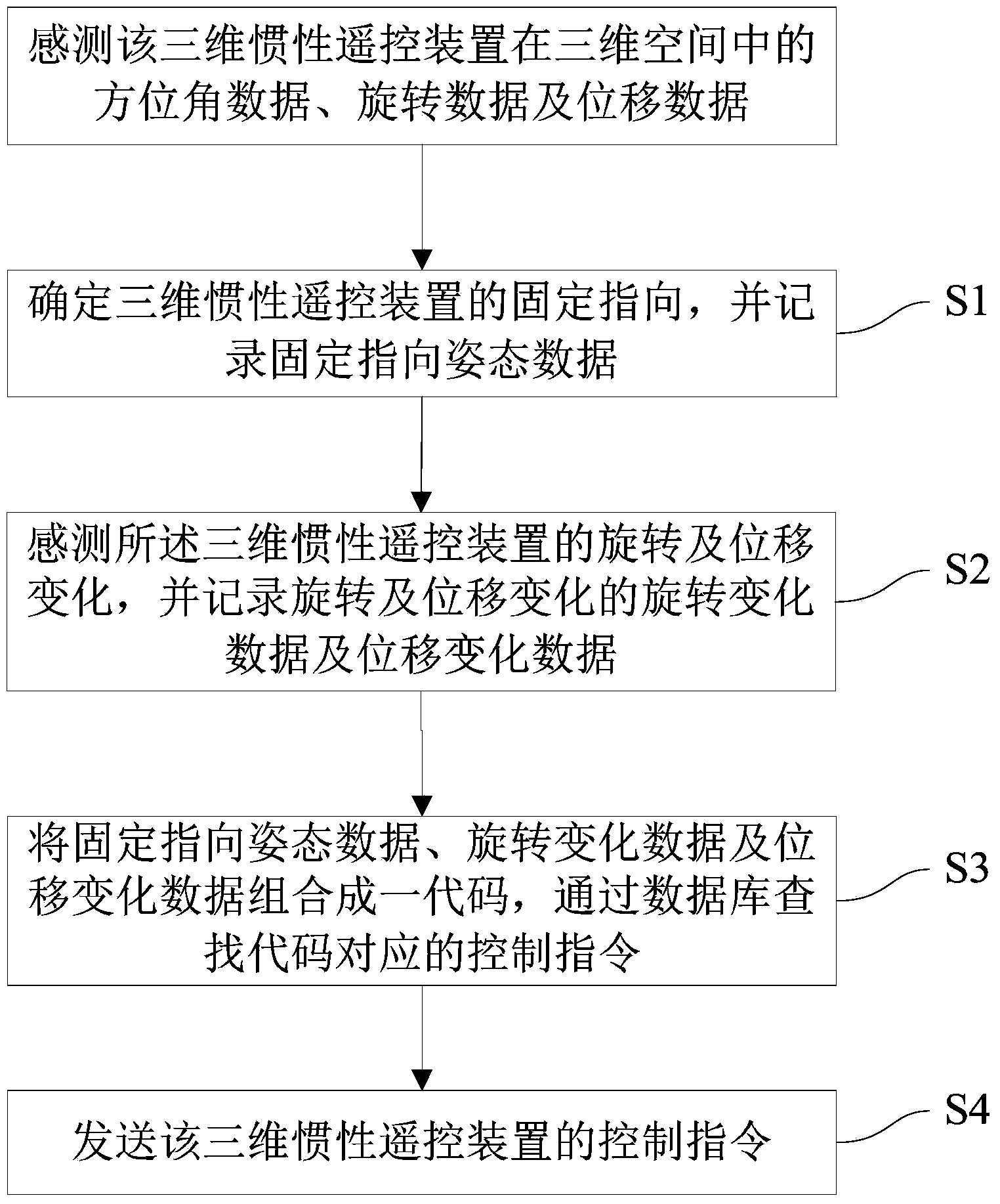
[0049] S2-1: First sense the rotation change data of the three-dimensional inertial remote control device 100 to judge the start and stop of the command. Rotating the remote control device 100 clockwise starts an input command, and stopping clockwise or counterclockwise is a stop input command operation. Then sense the displacement change data of the three-dimensional inertial remote control device 100 to determine the command size. The displacement change data includes displacement direction and displacement speed. Speed controls how much the volume changes. Finally, the rotation change data and displacement change data during the rotation and displacement change process are recorded. In this use process, the volume can be controlled only by controlling the rotation direction and displacement of the three-dimen...
Embodiment 2
[0051] In this embodiment, the fixed pointing is directly above the reference pointing as an example to control the size of the channel selection.
[0052] S2-2: First sense the displacement change data of the three-dimensional inertial remote control device 100 to judge the start and stop of the command. The displacement change data is the displacement direction. Stopping the upward movement or the displacement in the positive downward direction is the stop of the input command. Then sense the clockwise or counterclockwise rotation change data of the three-dimensional inertial remote control device 100 with a fixed pointing as the axis to determine the command size. The rotation change data includes the rotation direction, rotation angle, and rotation speed, such as clockwise rotation. In order to control the increase of the size of the channel selection, the counterclockwise rotation direction is to control the decrease of the channel selection, and the size of the channel s...
Embodiment 3
[0054] In this embodiment, the fixed pointing is taken as an example to be directly to the left relative to the reference pointing, which is mainly applied to the control of the game interface.
[0055] S2-3: In the present embodiment, the start and stop of the command is controlled by the switch key. Simultaneously sense the rotation change data and displacement change data of the three-dimensional inertial remote control device 100 to determine the command size. The rotation change data includes the rotation direction, the rotation angle, and the speed of rotation. The displacement change data includes the displacement direction, the displacement size, and the movement speed. Simultaneous sensing of rotation change data and displacement change data can effectively simulate special boxing actions such as spiral forward, spiral backward, spiral up and spiral down in the game interface, and avoid the need to simultaneously control upward, downward and downward in the existing ga...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More