

Spacecraft relative orbit control method
A relative orbit and control method technology, applied in the field of short-distance relative orbit control, can solve problems such as difficulty in maintaining time, low pointing accuracy, and easy identity exposure, and achieve the effect of improving task accuracy, simple analysis ideas, and not easy to expose identity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
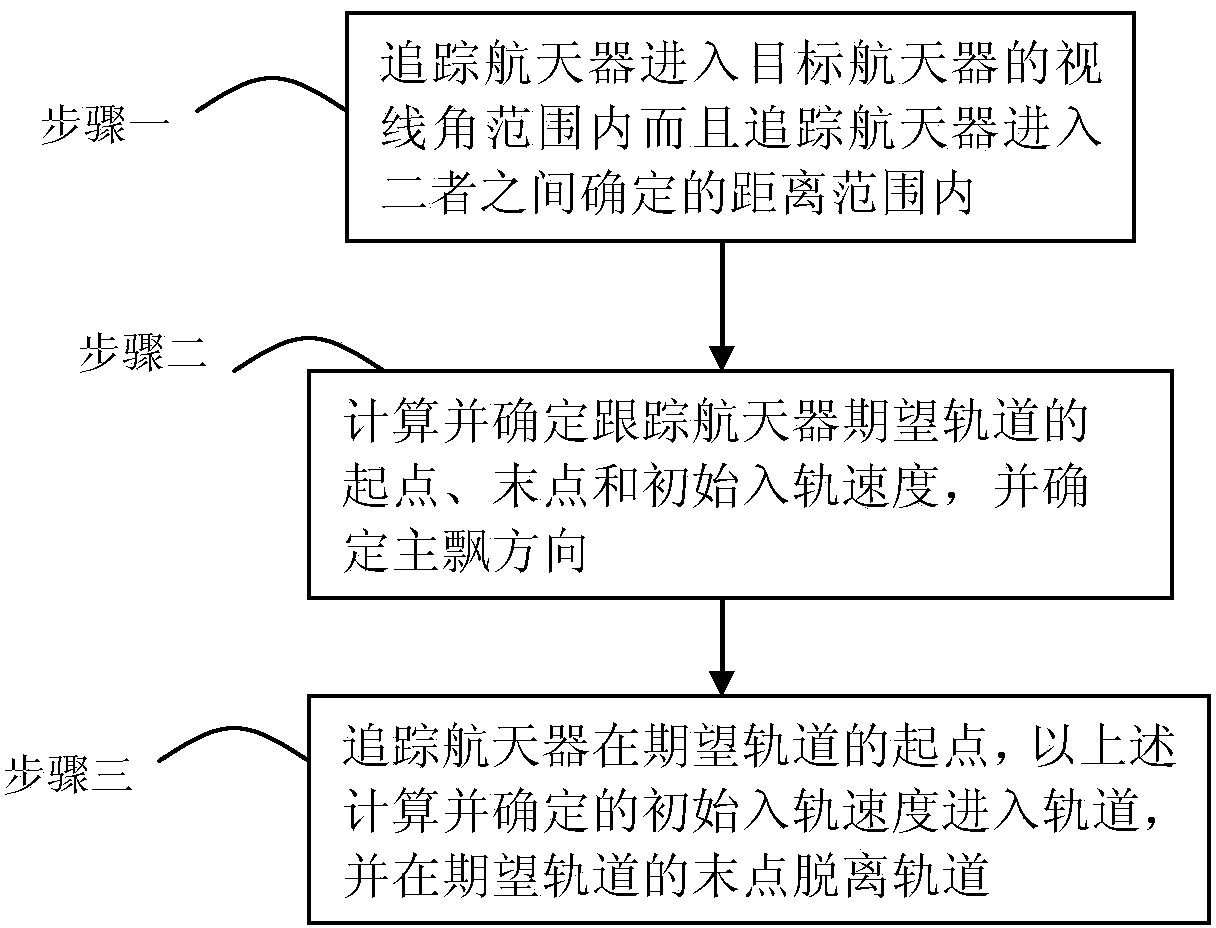
[0008] Specific implementation mode one: the following combination figure 1 This embodiment will be specifically described. This embodiment is realized through the following steps: 1. The tracking spacecraft enters the line-of-sight range of the target spacecraft and the tracking spacecraft enters the distance range determined between the two; 2. Calculate and determine the starting point of the expected orbit of the tracking spacecraft , the end point and the initial orbital velocity, and determine the main drift direction; 3. Track the spacecraft at the starting point of the desired orbit, enter the orbit at the initial orbital velocity calculated and determined above, and leave the orbit at the end point of the desired orbit, so that Complete the skimming maneuver of the target spacecraft.
[0009] (1) Explanation and customization of related concepts:
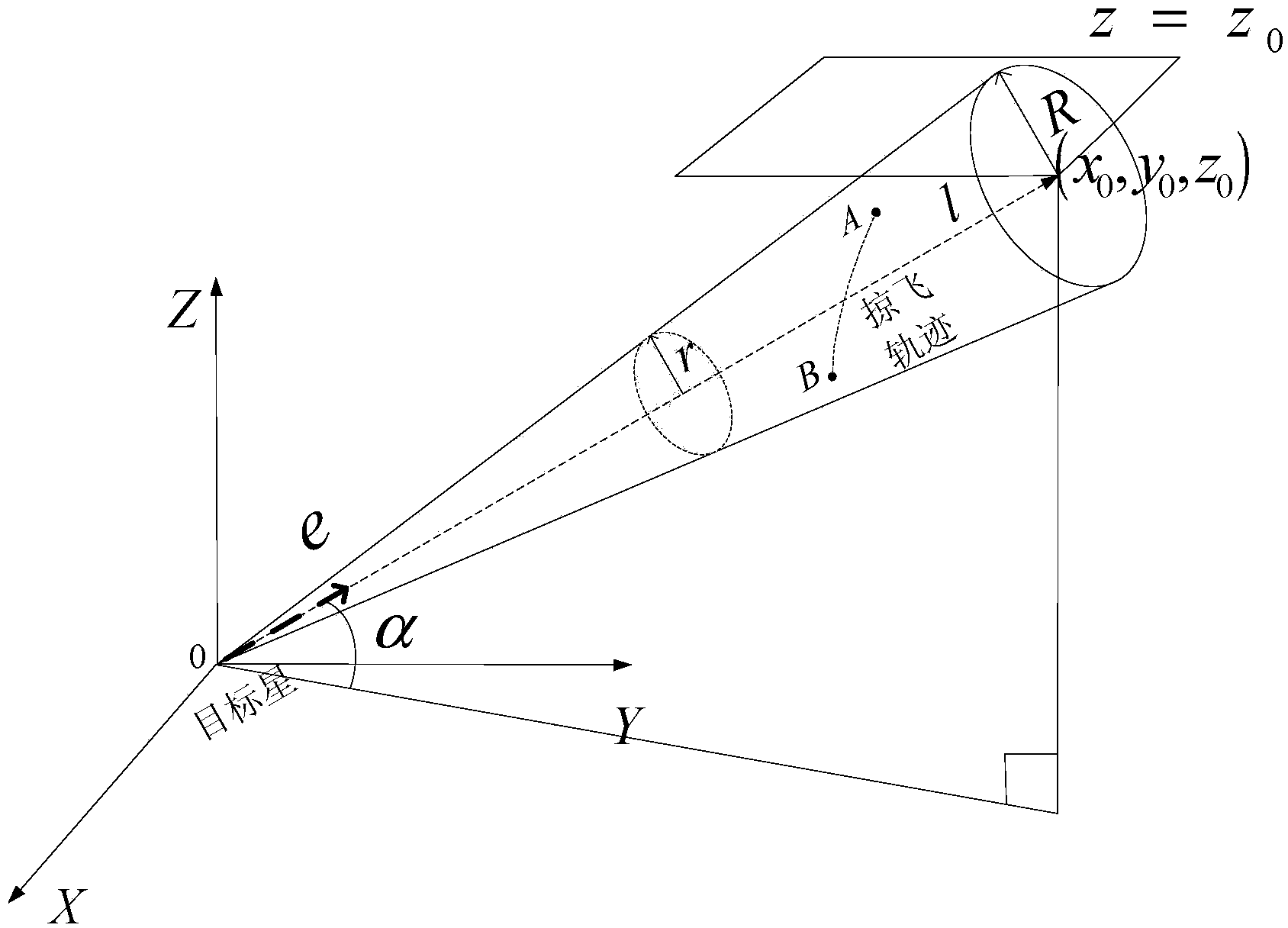
[0010] Geocentric inertial coordinate system (O-XYZ): The coordinate origin O is at the earth's barycenter, the Z-axis ...
specific Embodiment
[0267] Specific embodiments: the following is an algorithm simulation verification experiment.
[0268] (1) Simulation parameters
[0269] 1.1 Target star orbit parameters
[0270] The target star is in the GEO orbit, and the hexagram of the initial orbit is: a 1 =4.225×10 7 m, e 1 =0, i 1 =5°,Ω 1 =31°, ω 1 =0°, M0 1 =0°.
[0271] Satellite perturbation coefficient parameters
[0272] Aerodynamic coefficient C D =1, drag coefficient C d =2.2, reflection coefficient C r =0.8.
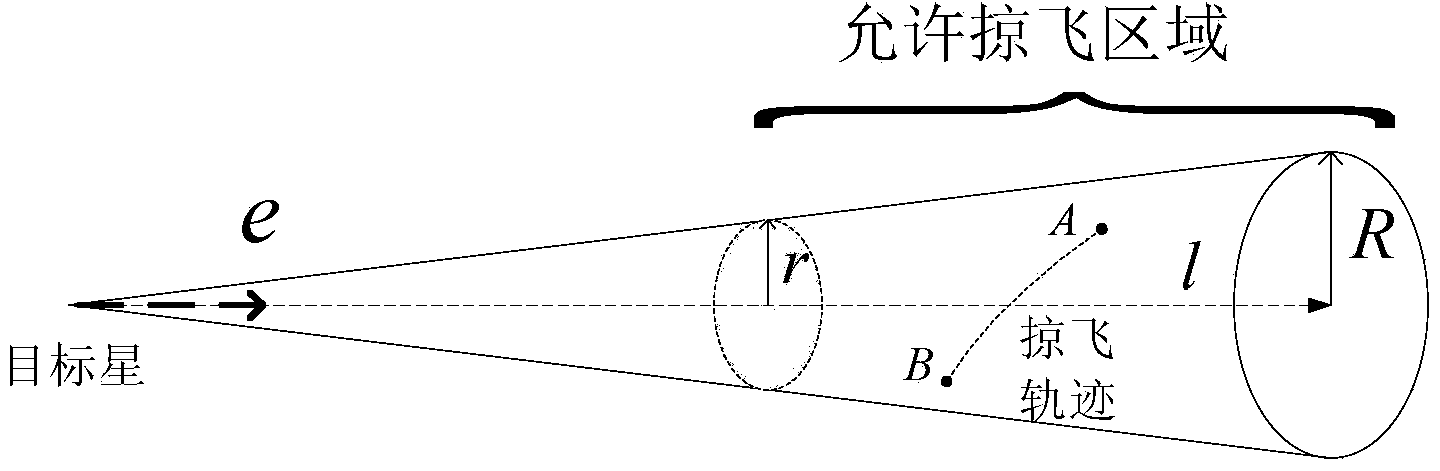
[0273] 1.2 Skimming parameters
[0274] Target star line of sight direction vector e -hill =[-49647;-5194;2863], the minimum distance R of the tracking star in the line of sight direction of the target star min =50km, the farthest distance is R max =99.2km, sight angle θ=0.35°. The expected fly-by time is designed around 800s.
[0275] (2) Skimming trajectory design
[0276] Firstly, according to the design idea of section 0, the main drift direction is given as the y direction. Reg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More