

Search and rescue robot
A robot and steering gear technology, applied in the field of search and rescue robots, can solve problems such as camera resource waste, and achieve the effects of simple structure, reduced manipulator mass, and reduced load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
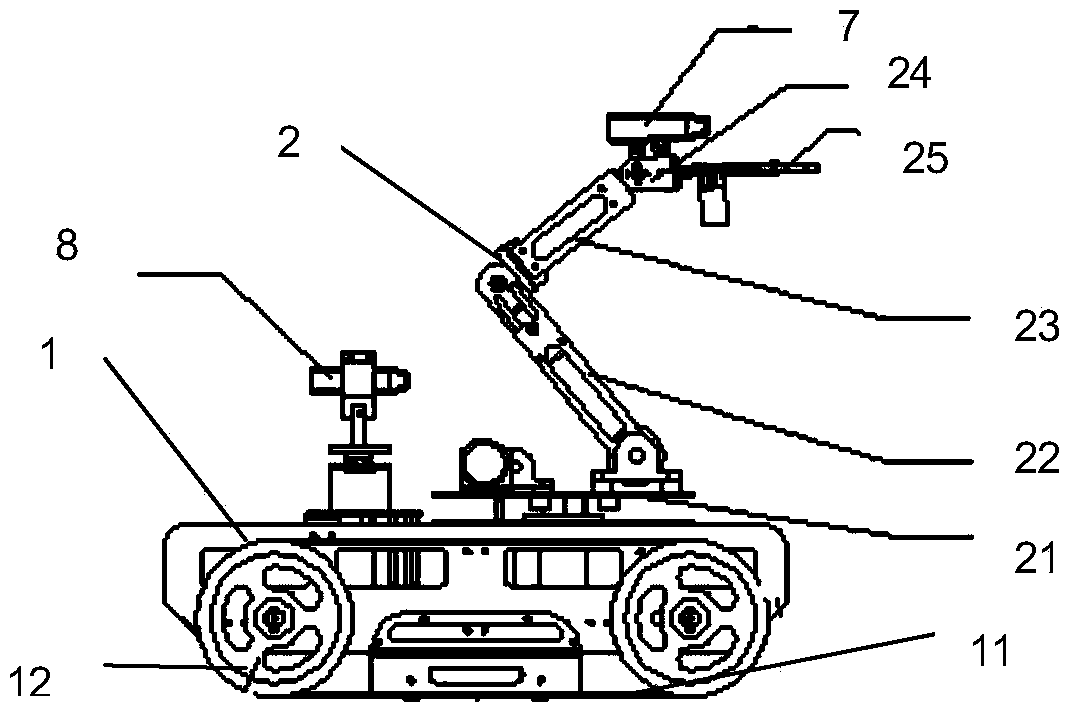
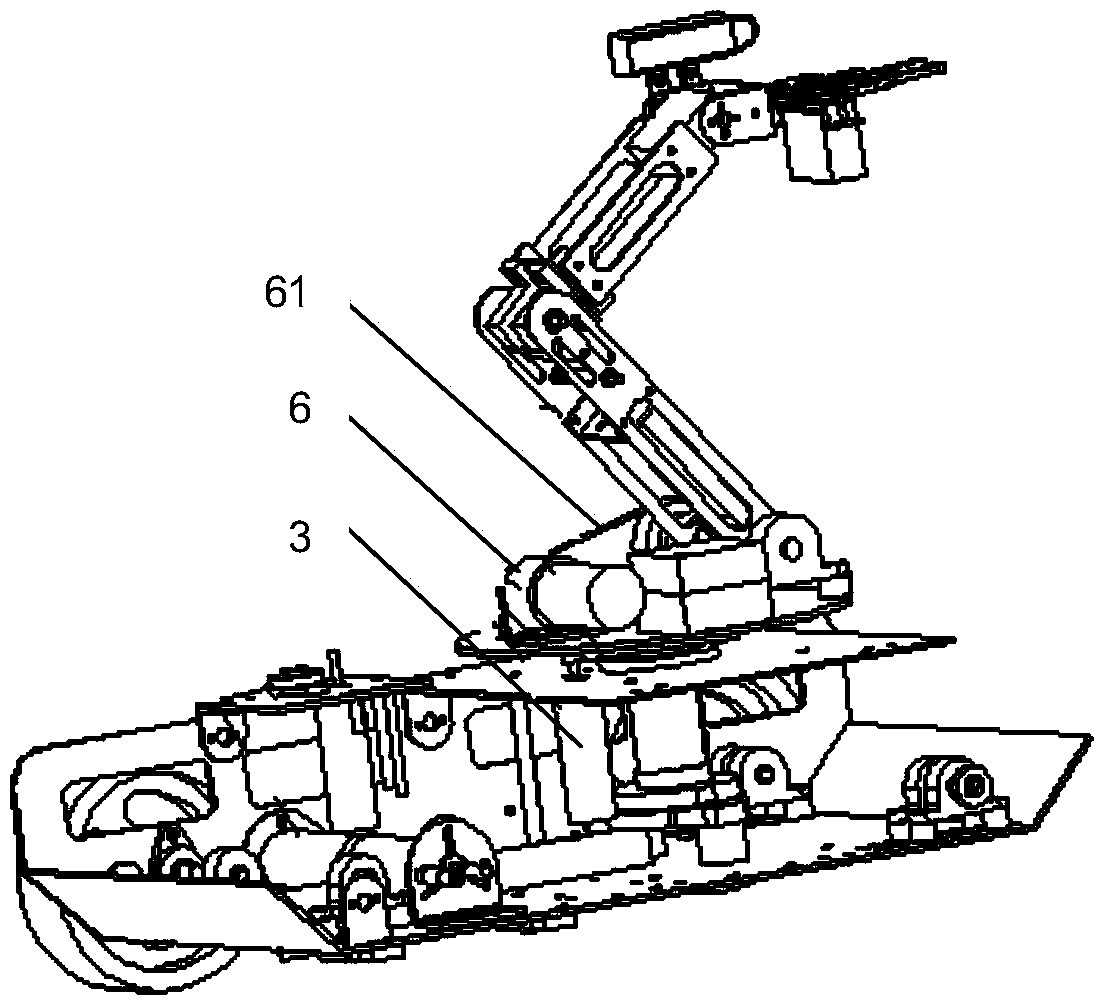
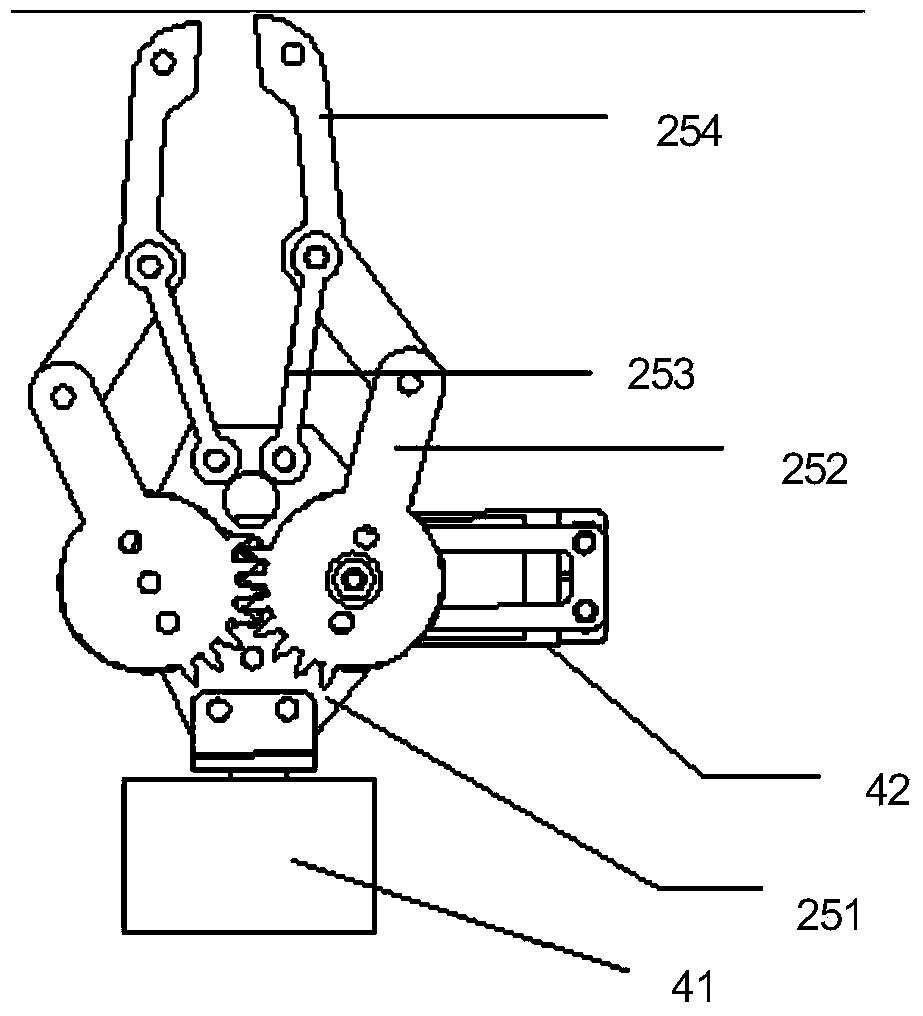
[0018] Such as figure 1 with figure 2 As shown, the track wheels 11 are symmetrically distributed on the left and right sides of the car body 1, wherein the driving wheel 12 is connected with the driving motor in the car body 1, and a DC motor 3 is installed at the bottom of the car body 1; At the front end of the car body 1, the six-degree-of-freedom manipulator 2 also includes a large arm 22, an elbow 23, a small arm 24, and a gripper 25, and a rotary table 21, a large arm 22, an elbow 23, a small arm 24, and a gripper 25 in sequence. connection; the rear of the turntable 21 is provided with a driven wheel 6, the driven wheel 6 is connected with the DC motor 3, and the driven wheel 6 is connected with the turntable 21 through a conveyor belt 61; the forearm 24 of the six-degree-of-freedom manipulator 2 is provided with a first camera 7. The rear end of the vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More