

Light-stream-based obstacle avoiding method of mobile robot
A mobile robot and robot technology, applied in the direction of instruments, non-electric variable control, measuring devices, etc., can solve problems such as unsatisfactory obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
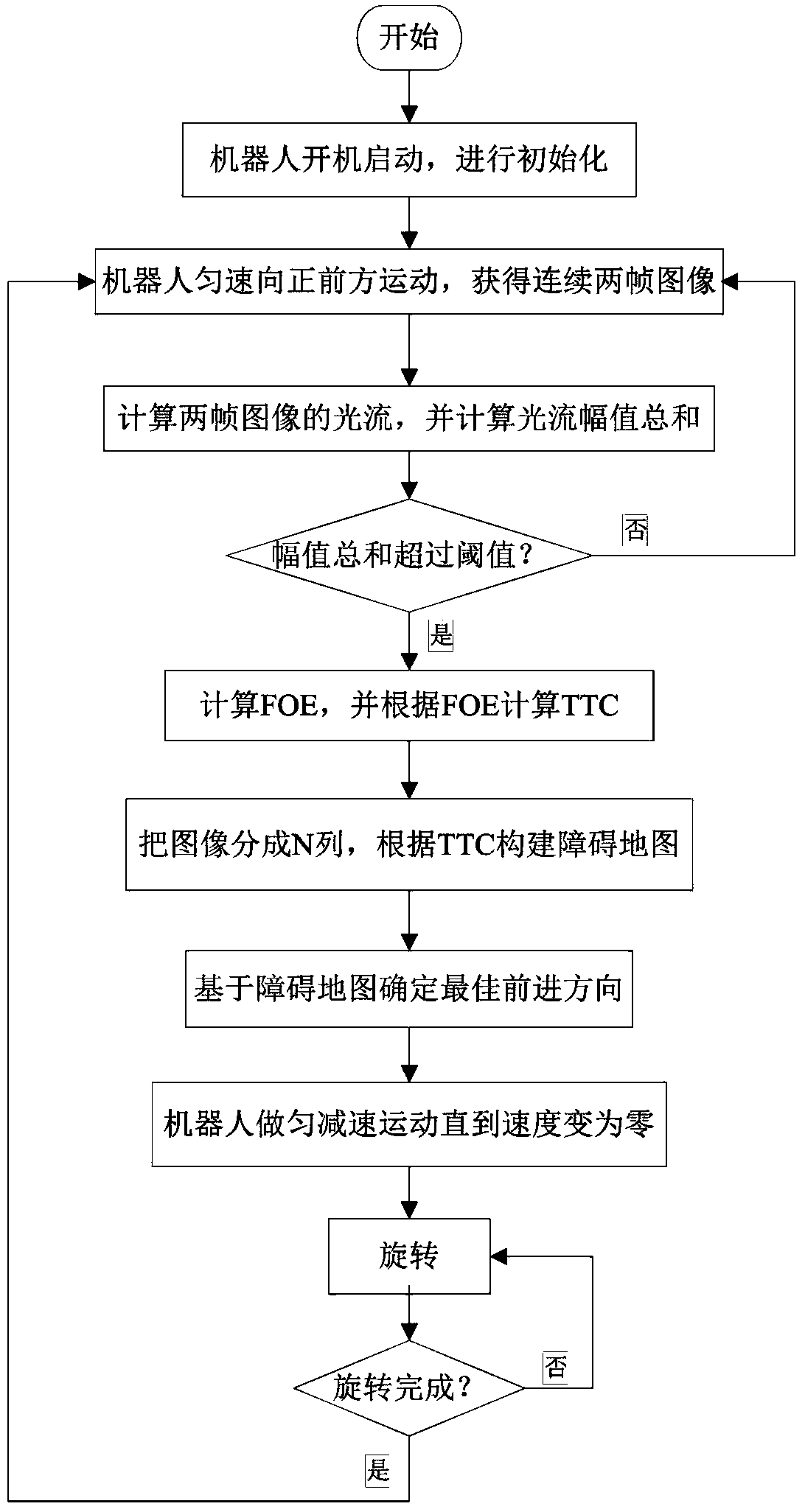
[0041] This embodiment is based on the aforementioned technical solution, and utilizes the matlab virtual reality toolbox to build a virtual 3D environment full of obstacles, such as figure 2 , image 3 , Figure 4 , Figure 5 shown, according to figure 1 The flow chart shown is implemented, and the specific implementation plan is:
[0042] The S1 robot starts up and initializes.
[0043] S2 gives the robot a speed V (0m / s-0.15m / s) (the speed cannot be set too high, otherwise it violates the assumption of small motion in optical flow calculation), let the robot move forward at a constant speed of V, and obtain two frames before and after image. In this embodiment, the robot speed V=0.05m / s.
[0044] S3 calculates the optical flow of the two frames of images and the sum of the optical flow amplitudes of all pixels in the entire image. In this embodiment, the HS algorithm is used to calculate the optical flow, and the gradient operators used to calculate the partial deri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More