

Unmanned surface vehicle path planning method based on neighborhood intelligent water drop algorithm
A technology of path planning and intelligent water droplets, applied in two-dimensional position/channel control and other directions, can solve the problems of IWD algorithm easily falling into local optimal solution, premature convergence speed of the algorithm, etc., to achieve the effect of improving autonomy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solution of the present invention will be described in more detail below in conjunction with the accompanying drawings.
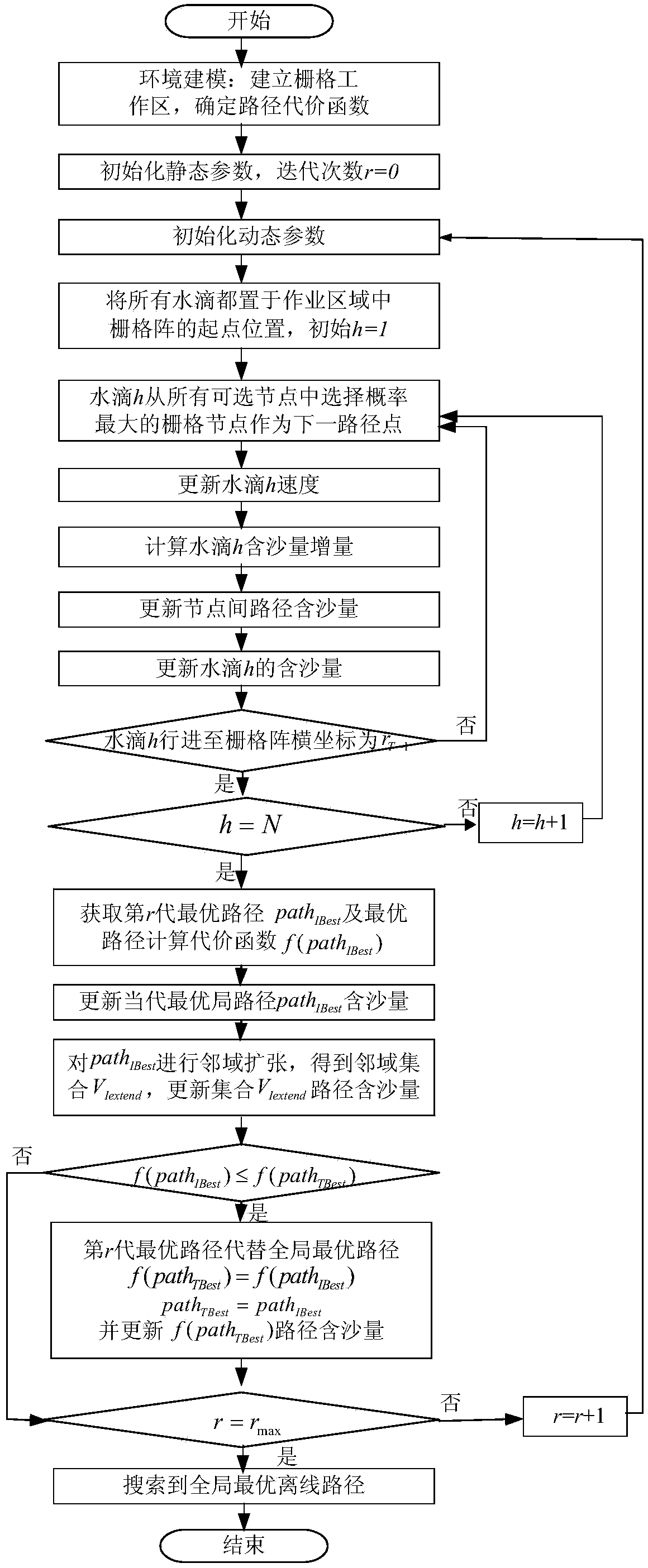
[0039] The present invention improves the problem that the basic IWD method is easy to fall into the local optimal solution, which leads to premature method and slow convergence speed. On the basis of the basic IWD method, the optimal solution neighborhood expansion mechanism and the global optimal emphasis mechanism are added, and the neighborhood intelligent water droplet is proposed. (Neighborhood Intelligent Water Drops, NIWD) method. And use the NIWD method to provide an effective and fast USV path planning method, which solves the problems existing in the existing technology and meets the actual needs of USV operation engineering.
[0040] In the execution mechanism of the basic IWD method, water droplets choose the next path according to the probability of uniform random distribution of the path’s sand concentration. If most wate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More