

A multi-axis linkage device based on parallel modules
A multi-axis linkage and parallel technology, which is applied in the direction of feeding devices, large fixed members, metal processing machinery parts, etc., can solve the problems of inability to realize vertical and horizontal conversion, and achieve the effect of large rotation output capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
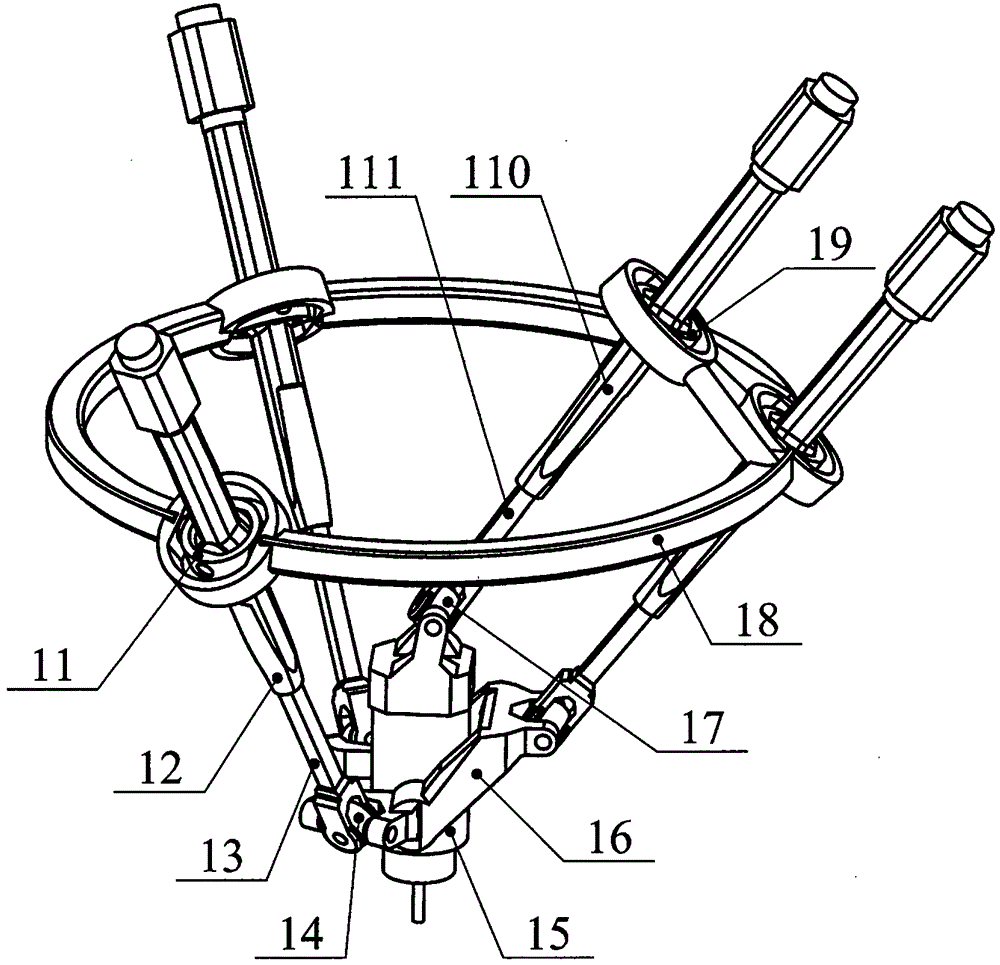
[0020] The structure of a multi-axis linkage device based on parallel modules in this embodiment is as follows figure 1 Shown, comprise fixed platform 18, moving platform 15 and U-shaped frame 16, and connect first, second and the 3rd branch chain between described fixed platform 18 and U-shaped frame 16, connect described moving platform 15 and The fourth branch chain between the fixed platforms 18; the first, second and third branch chains are respectively connected with the fixed platform 18 and the U-shaped frame 16, and the U-shaped frame 16 is connected with the moving platform 15 through a rotating pair, and the described The fourth branch chain is connected with the fixed platform 18 and the moving platform 15 to form a space parallel closed-loop mechanism.
[0021] The first, second and third branch chains have the same structure, and all include: a connecting piece 11, an upper connecting rod 12, a lower connecting rod 13, a connecting block 14 and a kinematic pair. ...
Embodiment 2
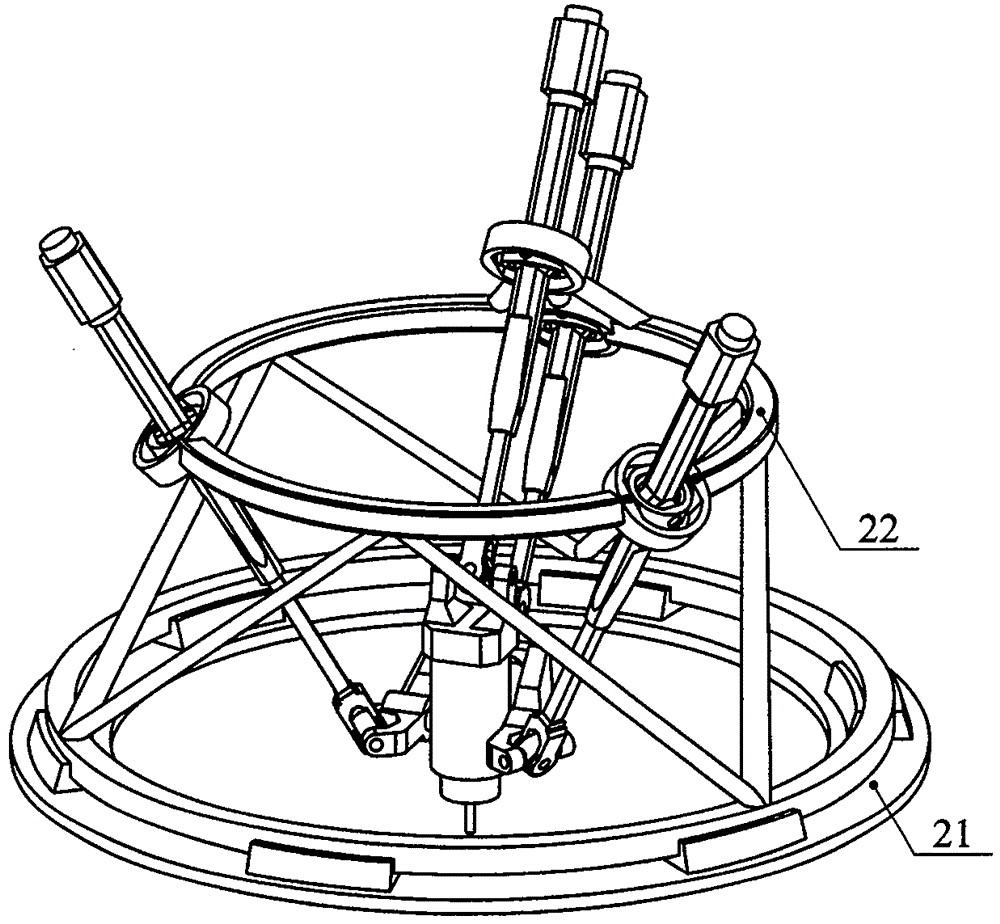
[0025] The structure of a multi-axis linkage device based on parallel modules in this embodiment is as follows figure 2 As shown, the multi-axis linkage device is different from Embodiment 1 in that: the multi-axis linkage device also includes a circular guide rail 21 and a kinematic pair. There is one kinematic pair, which is a rotary pair connected between the fixed platform 22 and the annular guide rail 21, and the rotary pair is driven. The device can realize five-axis linkage control of three degrees of freedom of movement and two degrees of freedom of rotation.
Embodiment 3
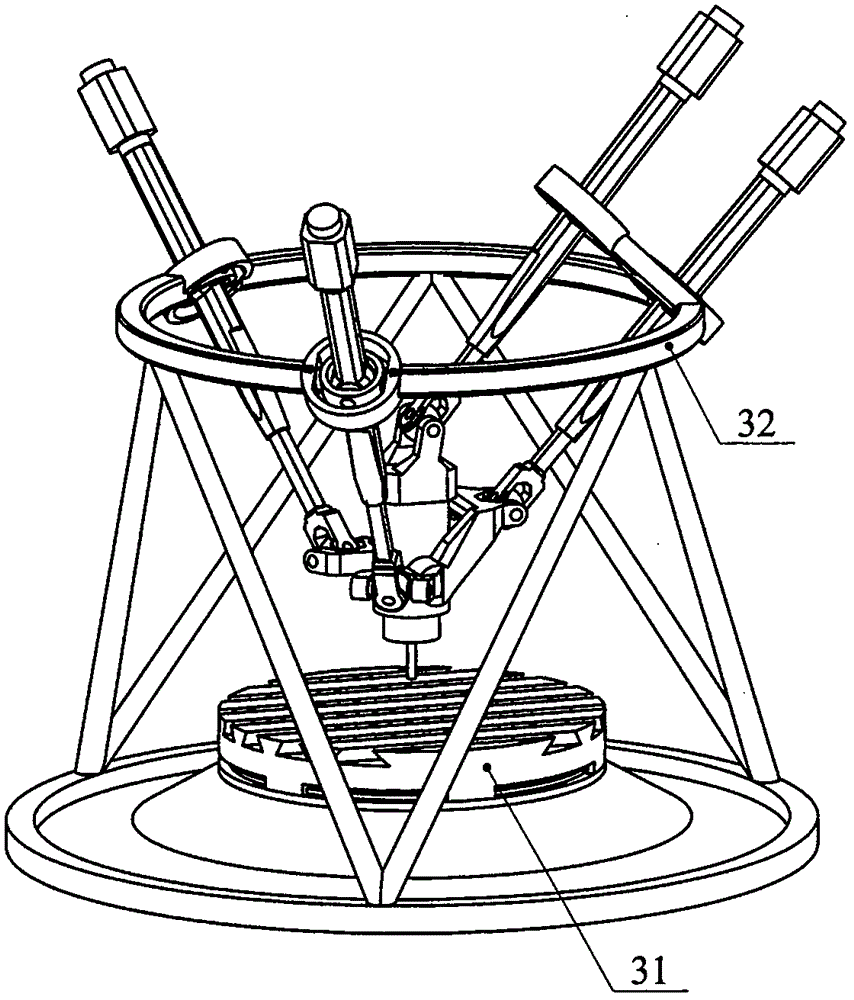
[0027] The structure of a multi-axis linkage device based on parallel modules in this embodiment is as follows image 3 As shown, the multi-axis linkage device is different from Embodiment 1 in that: the multi-axis linkage device also includes a turntable 31 and a kinematic pair. There is one kinematic pair, which is a rotary pair connected between the fixed platform 32 and the turntable 31, and the rotary pair is driven. The device can realize five-axis linkage control of three degrees of freedom of movement and two degrees of freedom of rotation.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More