

Position type ADRC method with undisturbed switching function
A technology of active disturbance rejection control and active disturbance rejection controller, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of smooth transition of uncontrollable quantities, regardless of disturbance-free switching, and adverse system safety. And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
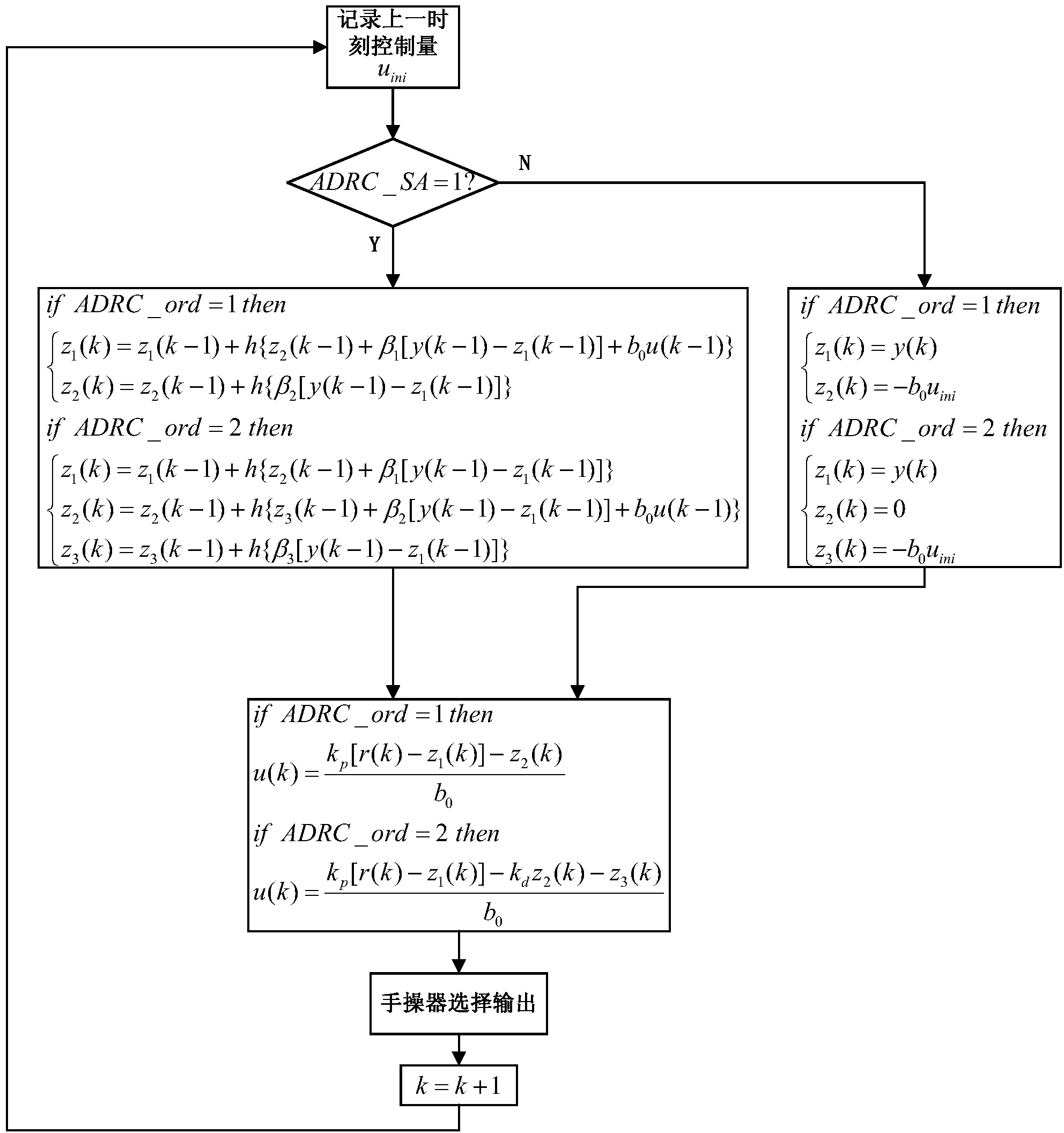
[0036] The disturbance-free switching method of a position-type linear first-order and second-order ADRC controller proposed by the present invention is described in detail as follows in conjunction with the accompanying drawings:
[0037] The method proposed by the present invention is based on the discrete ADRC digital realization of the continuous ADRC controller, and the selected linear ADRC form adopts "ADRC Technology—Estimated Compensation Uncertainty" written by Han Jingqing Linear State Observer and Linear Error Feedback and Control Laws in Control Techniques for Factors. For linear first-order and second-order ADRC controllers, Euler's method is used to discretize to obtain a digitally realized ADRC controller. Therefore, during the discretization process, the following processing methods are adopted for the derivative part of the control algorithm:
[0038] x · = x ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More