

Model-reference based adaptive cruise control method of car-following system
A technology of adaptive control and vehicle following, which is applied in the field of establishing the reference model of the vehicle following system, and can solve problems such as failure to give
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
[0156] The technical scheme of the present invention is verified below in conjunction with a simulation example.
[0157] The initial parameters of the car-following system are as follows: =100m, =6200m, =20m / s, =45m / s, =-1.1m / s 2 , =5% and =1m / s.
[0158] The control strategy adopted by the vehicle in front is shown in formula (15).
[0159] (15)
[0160] The specific implementation steps of the technical solution of the present invention are as follows in this example:
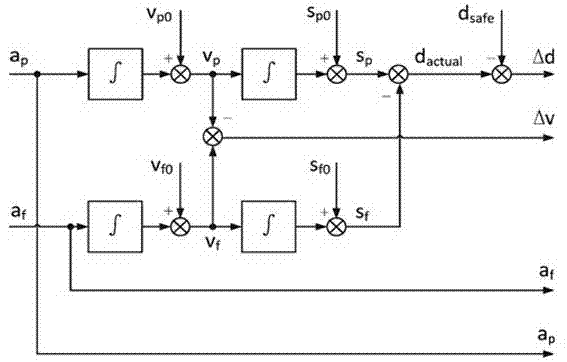
[0161] step 1: Build a car-following system model. For the block diagram of the car following system, see figure 1 shown. The mathematical model of the car-following system is as follows.
[0162]
[0163]
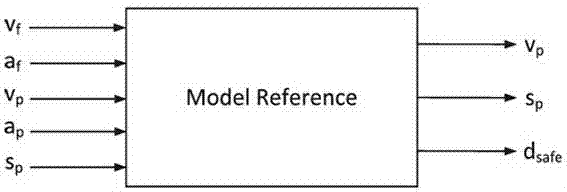
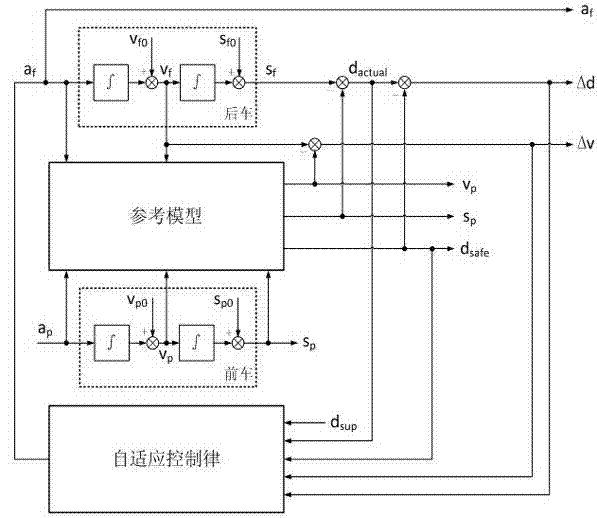
[0164] step 2 : Establish a reference model for car-following control, its block diagram is shown in figure 2 shown. The mathematical description of the reference model is as follows
[0165]
[0166] step 3 : Real-time calculation of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More