

Method for detecting vision localization of QFP element
A detection method and visual positioning technology, applied in computer parts, instruments, characters and pattern recognition, etc., can solve the problems of high precision requirements, long consumption time, uneven image gray value, etc., to achieve high execution efficiency, high The effect of resolution and precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0029] Specific embodiment one: a kind of detection method for QFP element visual positioning of this embodiment is realized according to the following steps:
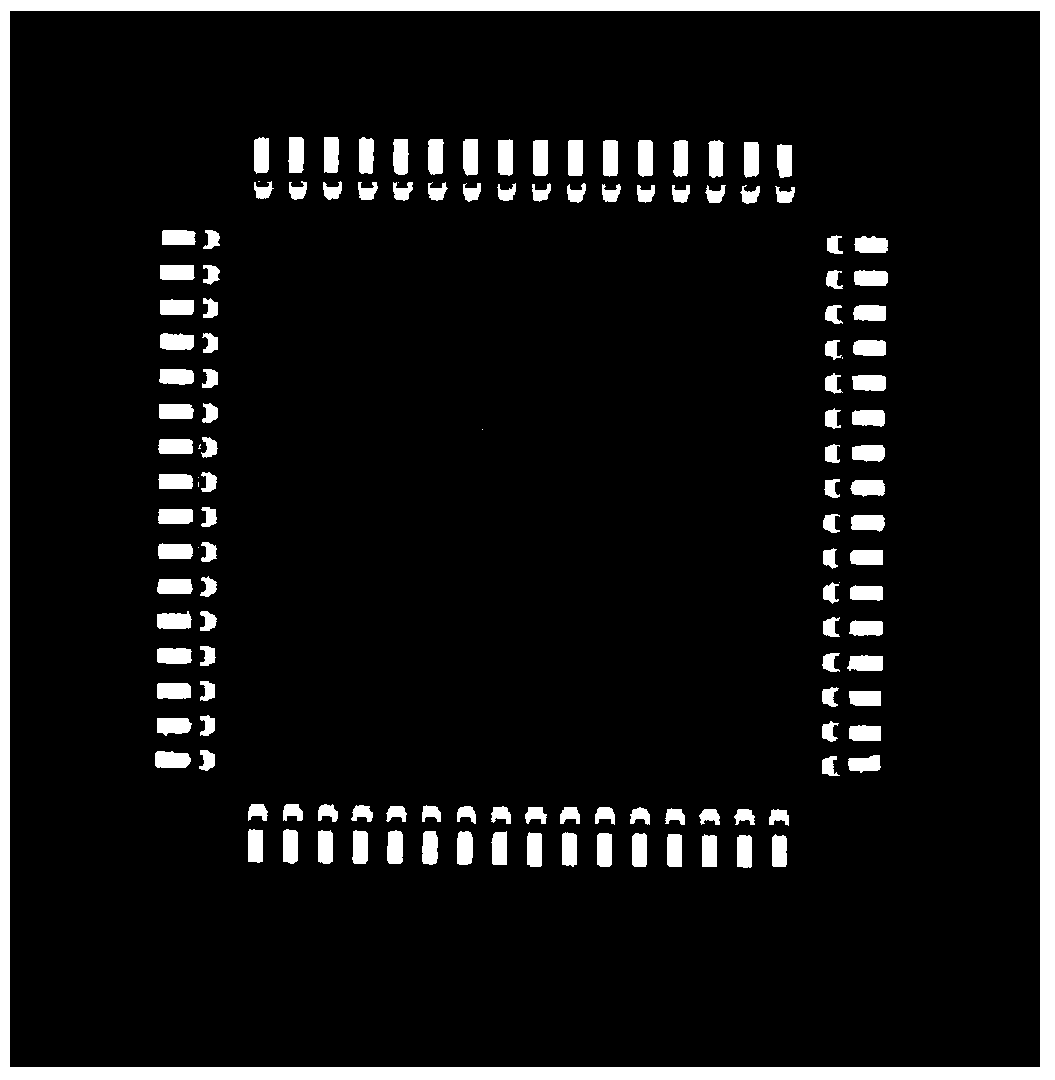
[0030] Step 1, using an optical lighting system to obtain a grayscale image of the QFP element;
[0031] Step 2, preprocessing the image obtained in step 1 to filter out noise in the image;
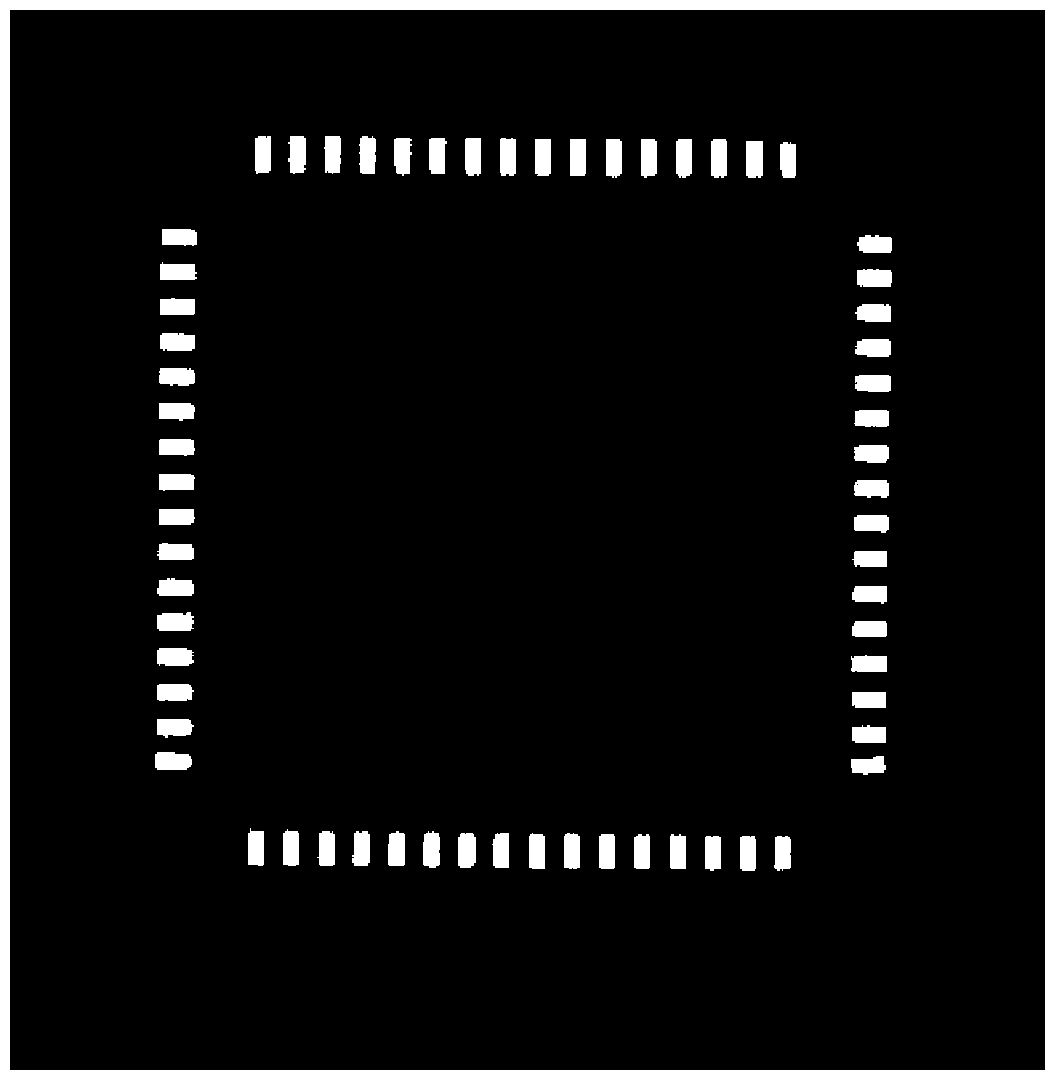
[0032] Step 3, the image obtained in step 2 is processed by an automatic threshold segmentation method, and each connected region is marked in the generated binary image using a connected region marking algorithm, and the connected region marking algorithm is realized by a two-pass scanning method; and The marked connected region is set as the foreground;
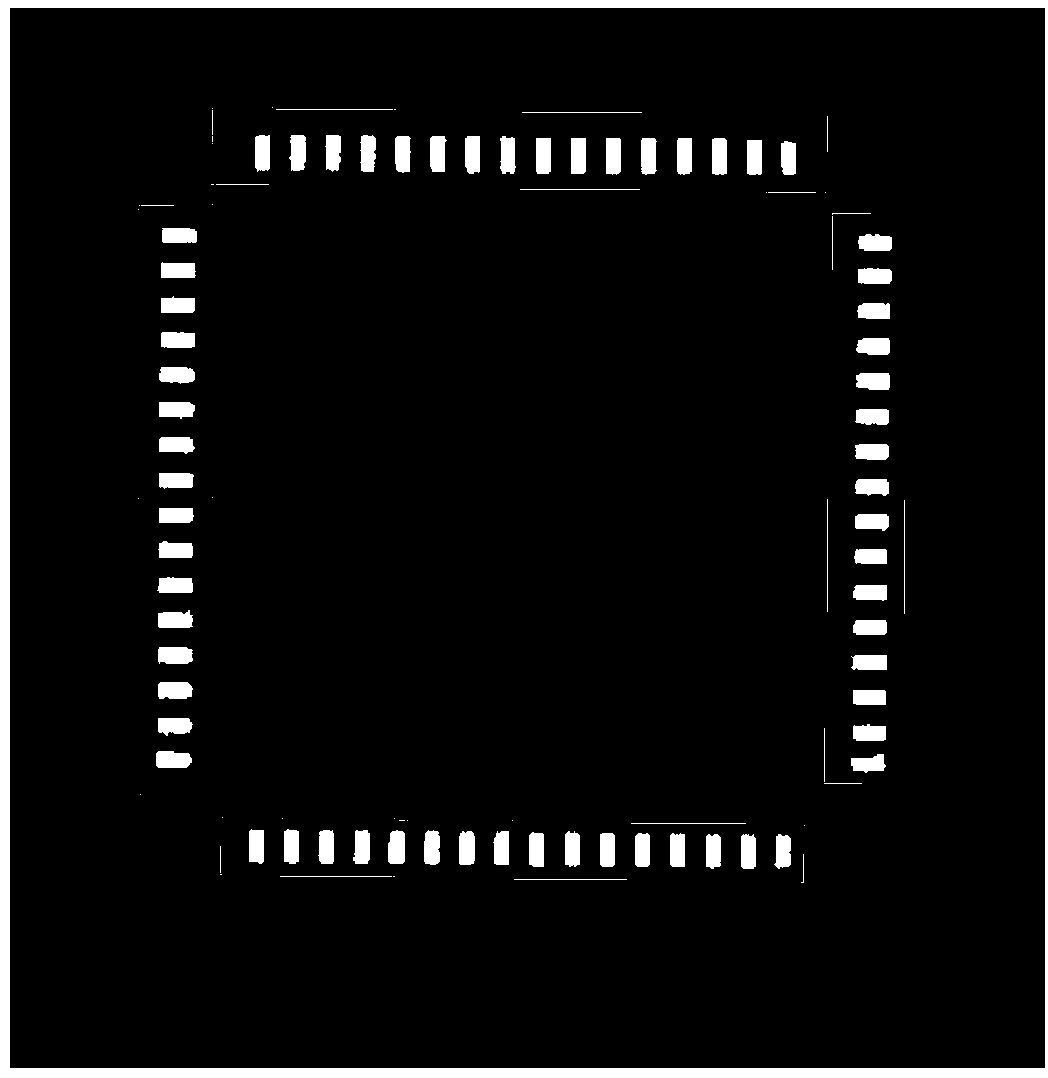
[0033] Step 4, count each connected region obtained in step 3, and calculate the area of the connected region, filter out small connected regions, and retain the image at the end of the pin;
[0034] Step 5. Mark the connected area on the pin end image obtained in step 4. C...
specific Embodiment approach 2
[0046] Specific implementation mode two: this implementation mode is a further explanation to specific implementation mode one: the two-pass scanning method described in step three is specifically implemented according to the following steps:
[0047] (1), scan the binary image, obtain the temporary label, according to the connection rule of 8 neighbors in the foreground, set any pixel as f(x, y), and its temporary connected domain label array as label(x, y); Starting from the upper left corner, the image is scanned from top to bottom and from left to right. When the pixel point f(x, y) is scanned, the scanning of the upper and left pixels of the pixel point has been completed, and the pixel points of these pixels are The label value is known; if the pixel f(x,y) is connected to the upper and left pixels, then assign its label value to the smallest label among the upper and left pixels; if f(x,y) and these pixels are not connected, then add a new label and assign the label of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More