

Pedestrian autonomous navigation calculation algorithm based on MEMS-IMU
A technology of autonomous navigation and navigation calculation, applied in the field of navigation calculation algorithm, can solve the problems of large navigation positioning error, inaccurate zero-speed detection, and short zero-speed correction time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
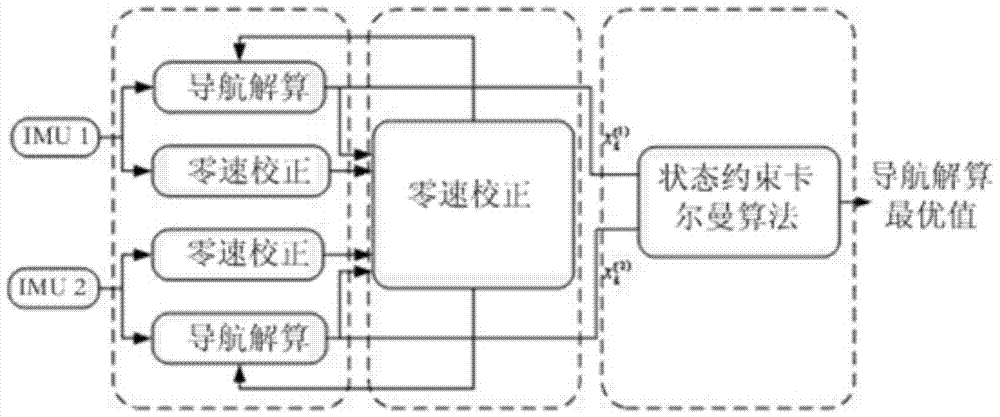
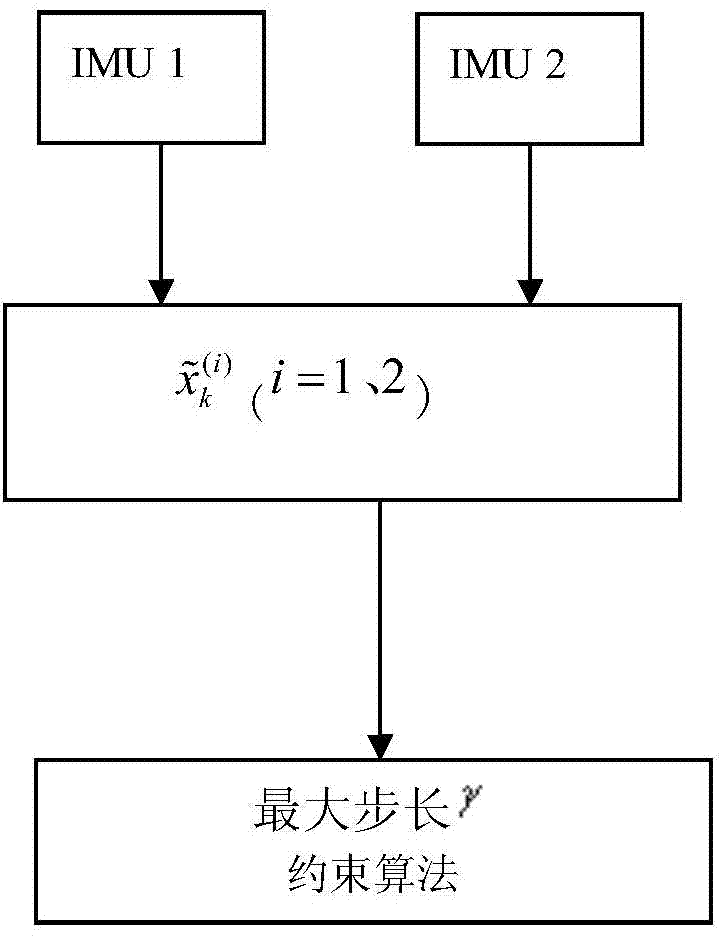
[0084] figure 1 It is the schematic diagram of pedestrian autonomous navigation solution based on dual MEMS-IMU, figure 2 It is the maximum step size value diagram in the pedestrian autonomous navigation solution algorithm based on dual MEMS-IMU.
[0085] A pedestrian autonomous navigation solution algorithm based on dual MEMS-IMU, which includes the following steps:
[0086] Step 1: Fix the two IMU systems in the pedestrian autonomous navigation system based on dual MEMS-IMU on the two feet of the pedestrian respectively, and the handheld PDA receives and stores the measurement information output by the two IMU systems in real time when the pedestrian is moving;
[0087] Step 2: Use the output data of the pedestrian autonomous navigation system stored in step 1, and use the strapdown inertial navigation system navigation solution method to find t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More