

A vertical take-off and landing unmanned aerial vehicle and its precise positioning and obstacle avoidance method
A vertical take-off and landing, precise positioning technology, applied in the field of unmanned aerial vehicles, can solve the problems of insufficient positioning accuracy, rising terminal costs, and declining positioning accuracy, and achieve the effects of accurate and safe operation, easy implementation, and high feasibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with embodiment.
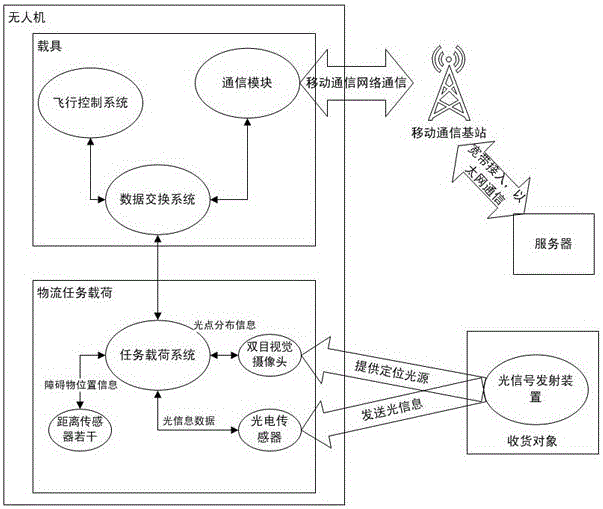
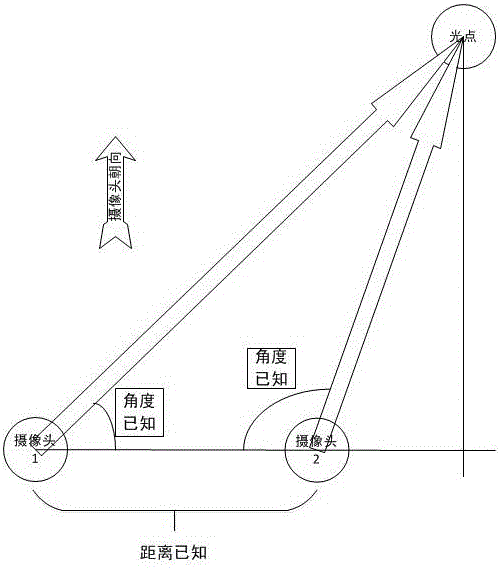
[0026] A kind of vertical take-off and landing UAV provided by this embodiment, such as figure 1 and figure 2 As shown, it includes a fuselage with a rotor, the left front part and the right front part of the fuselage are respectively provided with cameras pointing to the front of the UAV, and the optical axes of the two cameras are parallel and the distance is a fixed value; A photoelectric sensor is set in the front; distance sensors are set up, down and around the fuselage; the consignee is equipped with a strong light source that can modulate the light signal to cooperate with the camera of the drone; the drone and the server communicate wirelessly through the mobile phone signal network.
[0027] The above consignee is equipped with a strong light source that can modulate the optical signal, which can not only help guide positioning but also communicate, and the strong light s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More