

Stereo matching method and device thereof
A technology of stereo matching and matching cost, which is applied in the field of image processing, can solve the problems that the disparity map is prone to jitter, does not consider the time consistency of the target image and the reference image, and achieves the effect of realizing online processing and eliminating jitter
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Features and exemplary embodiments of various aspects of the invention will be described in detail below. The following description covers numerous specific details in order to provide a thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without some of these specific details. The following description of the embodiments is only to provide a clearer understanding of the present invention by showing examples of the present invention. The present invention is by no means limited to any specific configuration and algorithm presented below, but covers any modification, replacement and improvement of related elements, components and algorithms without departing from the spirit of the present invention.
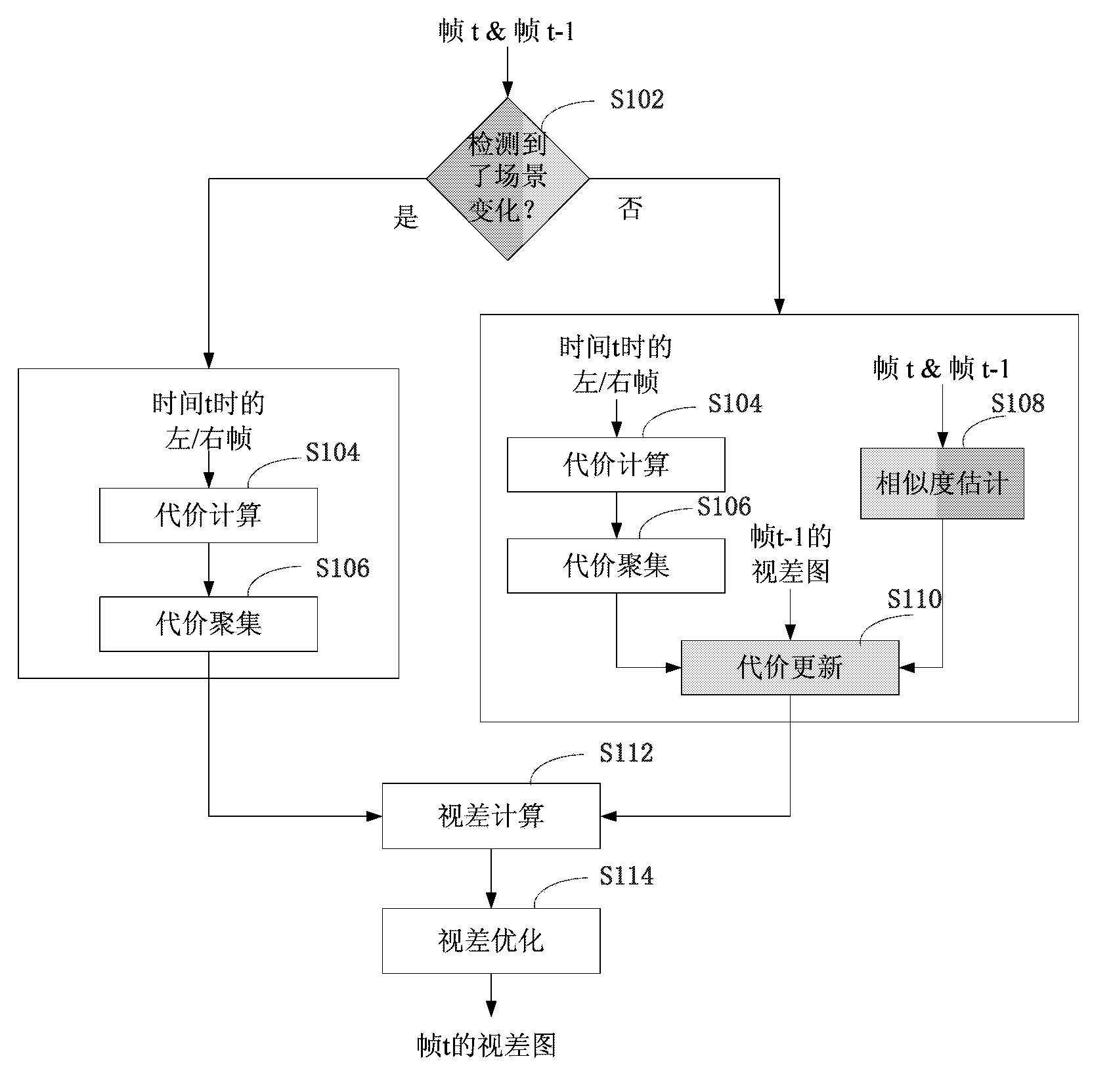
[0014] Traditional stereo matching methods generally include the following steps: a matching cost calculation step, a matching cost aggregation step, a disparity acquisition st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More