

A Cube-Rod Mechanism Realizing the Rotation of Ball-like Joints with Three Degrees of Freedom in Space by Linear Drive
A linear drive, degree of freedom technology, applied in the field of robotics, can solve problems such as complex calculations and poor decoupling, and achieve the effects of improved motion performance, light structure, and convenient motion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
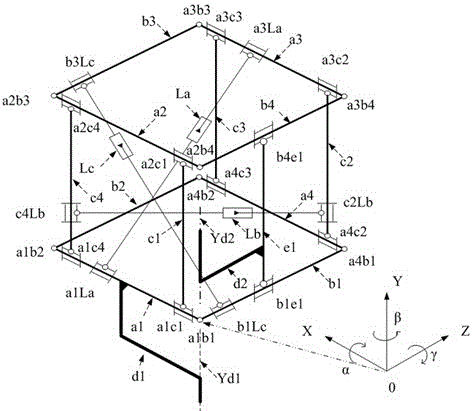
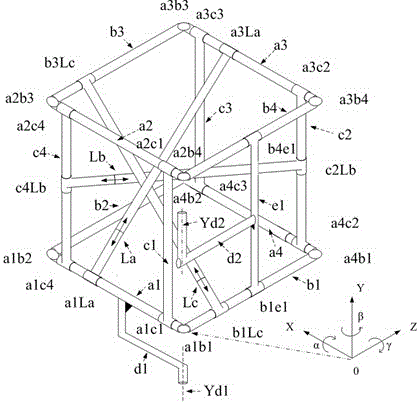
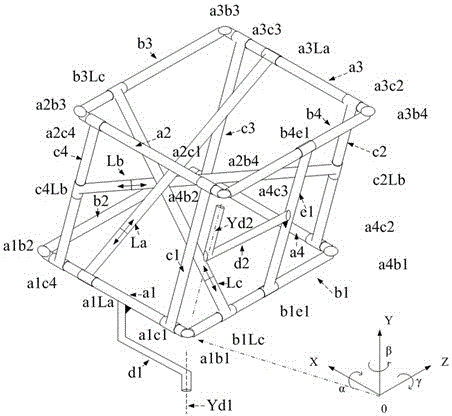
[0032] combine figure 1 , 2 , 3. This embodiment is a linear drive to realize the three-degree-of-freedom spherical joint rotation of the cube rod mechanism, including: coordinate system XYZ, ball joint angle αβγ, X-axis first rigid body a1, X-axis second rigid body a2, X-axis third rigid body a3, X-axis fourth rigid body a4, Y-axis first rigid body c1, Y-axis second rigid body c2, Y-axis third rigid body c3, Y-axis fourth rigid body c4, Z-axis first rigid body b1, Z Axis second rigid body b2, Z axis third rigid body b3, Z axis fourth rigid body b4, first base d1, second base d2, auxiliary rigid body e1, first telescopic rod La, second telescopic rod Lb, third Telescopic rod Lc, first hinge point a1b1 on XZ1 plane, second hinge point a4b1 on XZ1 plane, third hinge point a4b2 on XZ1 plane, fourth hinge point a1b2 on XZ1 plane, first hinge point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More