

Gripper of robot and method for controlling the same
A robot arm and robot technology, applied in the direction of robots, manipulators, program-controlled manipulators, etc., can solve the problem that the robot claws are difficult to hold heavy or long objects stably
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] A robot gripper and a method of controlling the robot gripper according to embodiments of the present disclosure are described below with reference to the accompanying drawings.
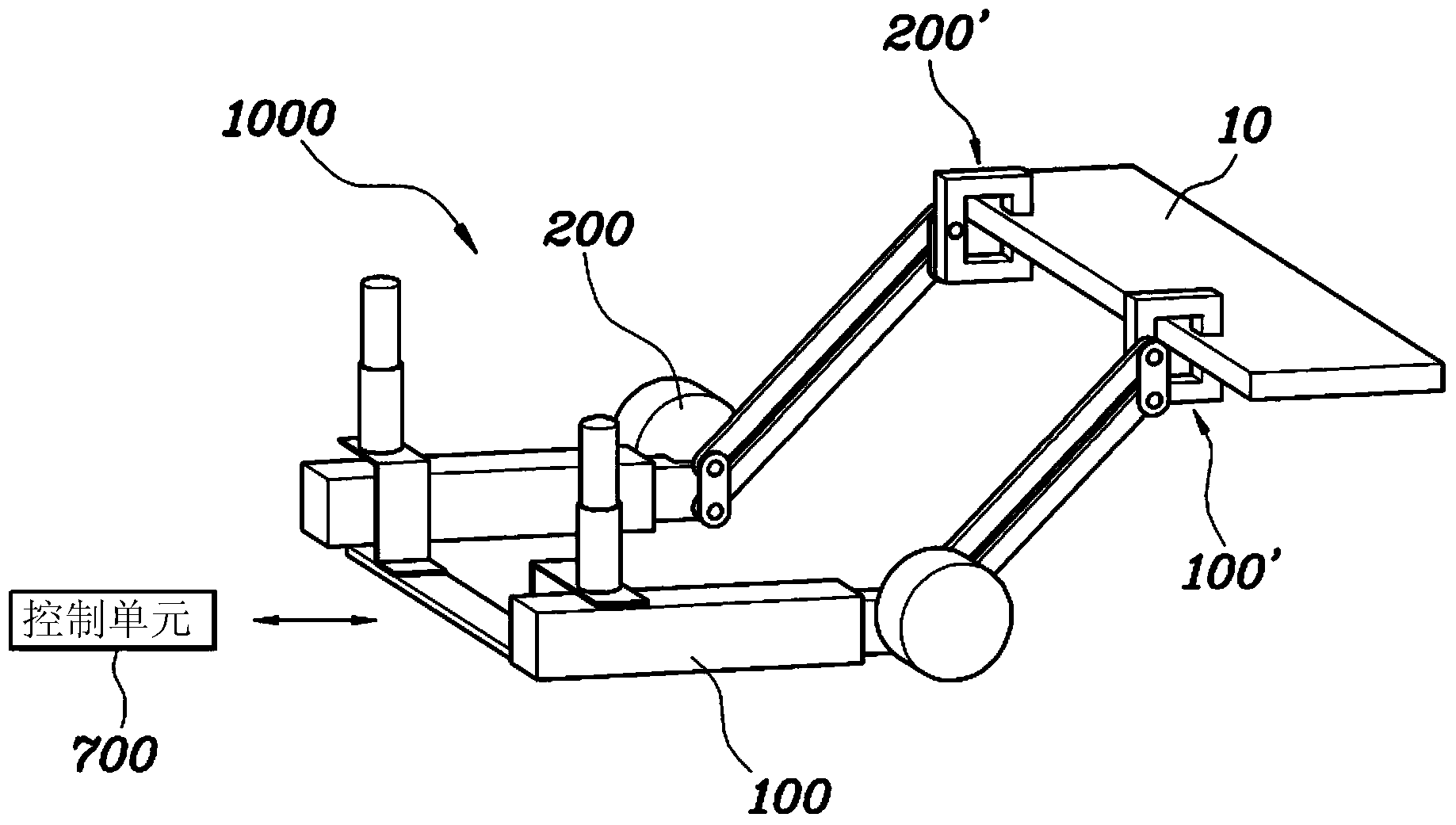
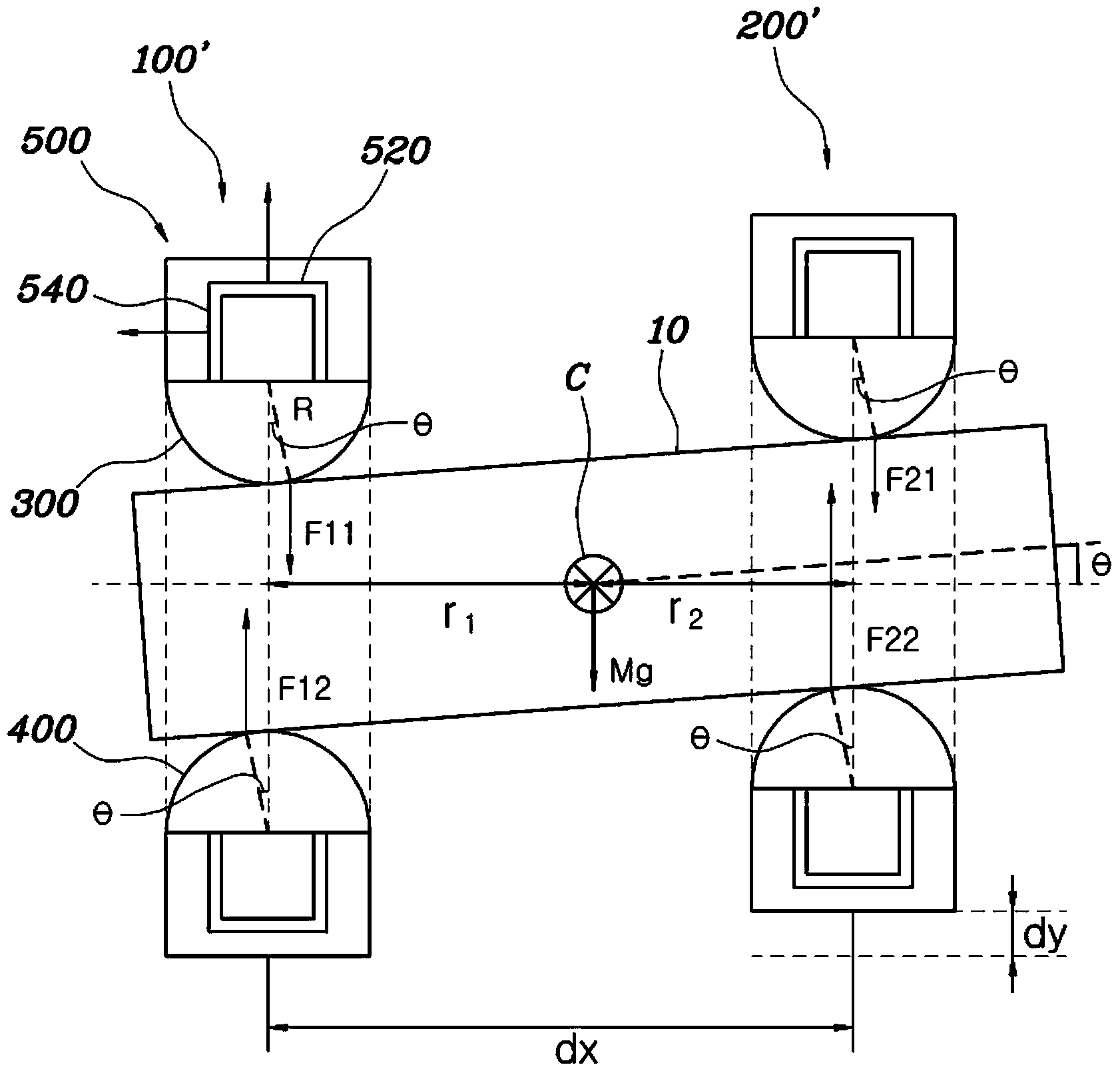
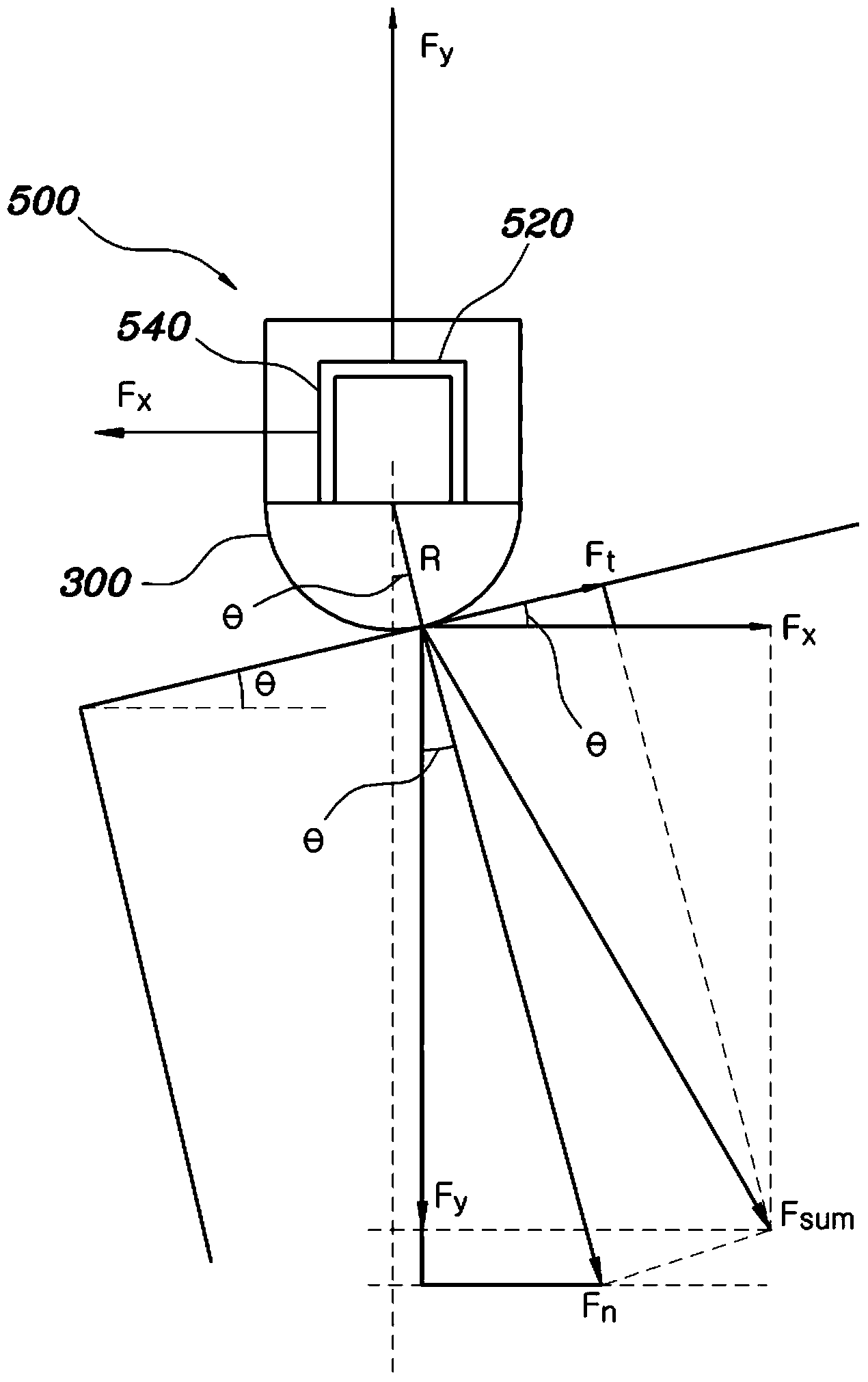
[0022] figure 1 is a view showing the configuration of a robot gripper according to an embodiment of the present disclosure; Figure 2 to Figure 3 is a view illustrating a method of controlling a robot gripper according to an embodiment of the present disclosure; and Figure 4 is a flowchart illustrating a method of controlling a robot gripper according to an embodiment of the present disclosure.
[0023] Such as figure 2 As shown, the robot gripper according to the embodiment of the present disclosure includes: an upper contact part 300 and a lower contact part 400 arranged at the ends 100', 200' of the two robot arms 100, 200 (see figure 1 ). The upper and lower contact portions 300 , 400 come into contact with the top and bottom of the object 10 when grasped. The upper and lower con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More