

Horizontal-motion rotating leg type stair cleaning robot and stair go-up-and-down method
A technology for cleaning robots and stairs, applied in the field of robots, can solve problems such as unfavorable marketing, large mechanism, and inability to work, and achieve the effects of expanding application range, compact structure, and easy cleaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
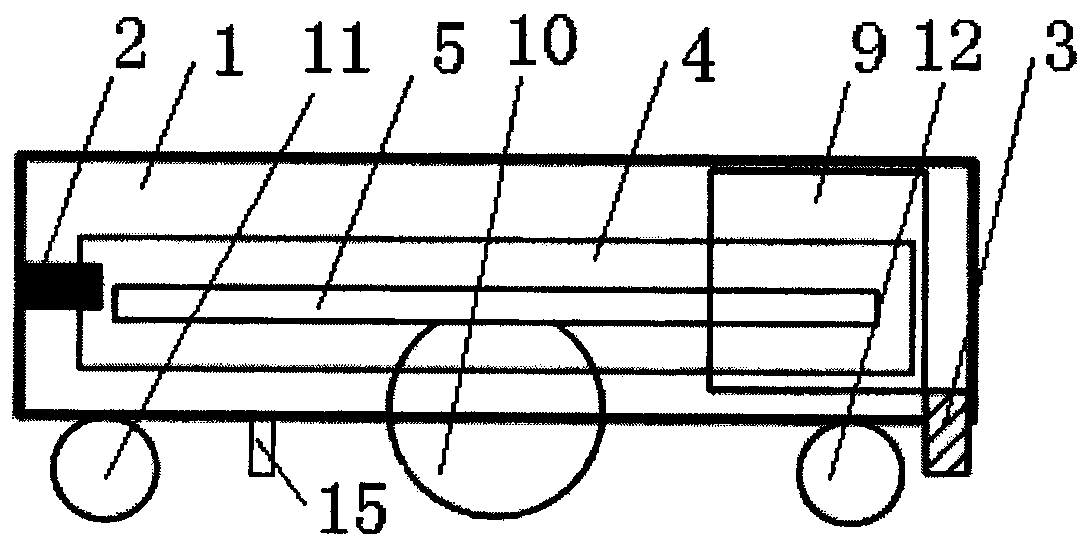
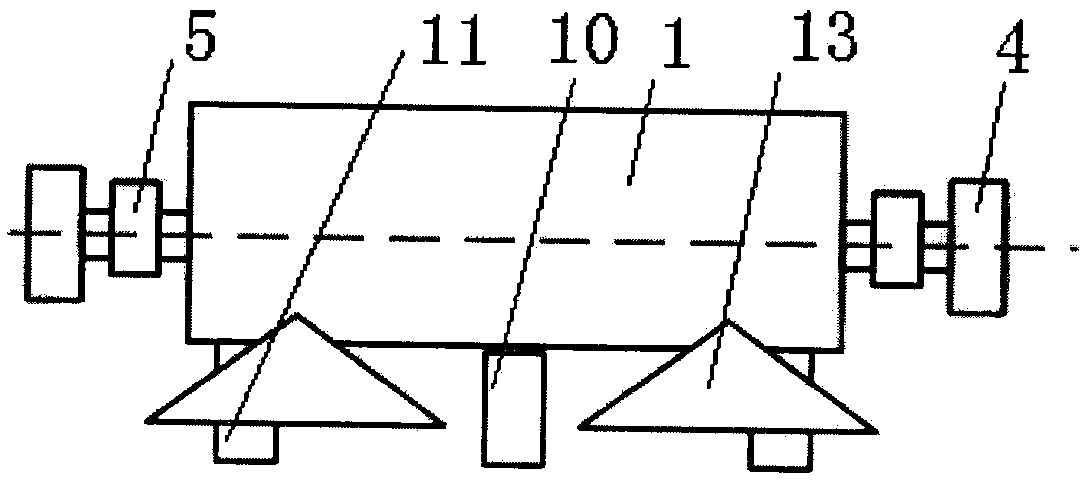
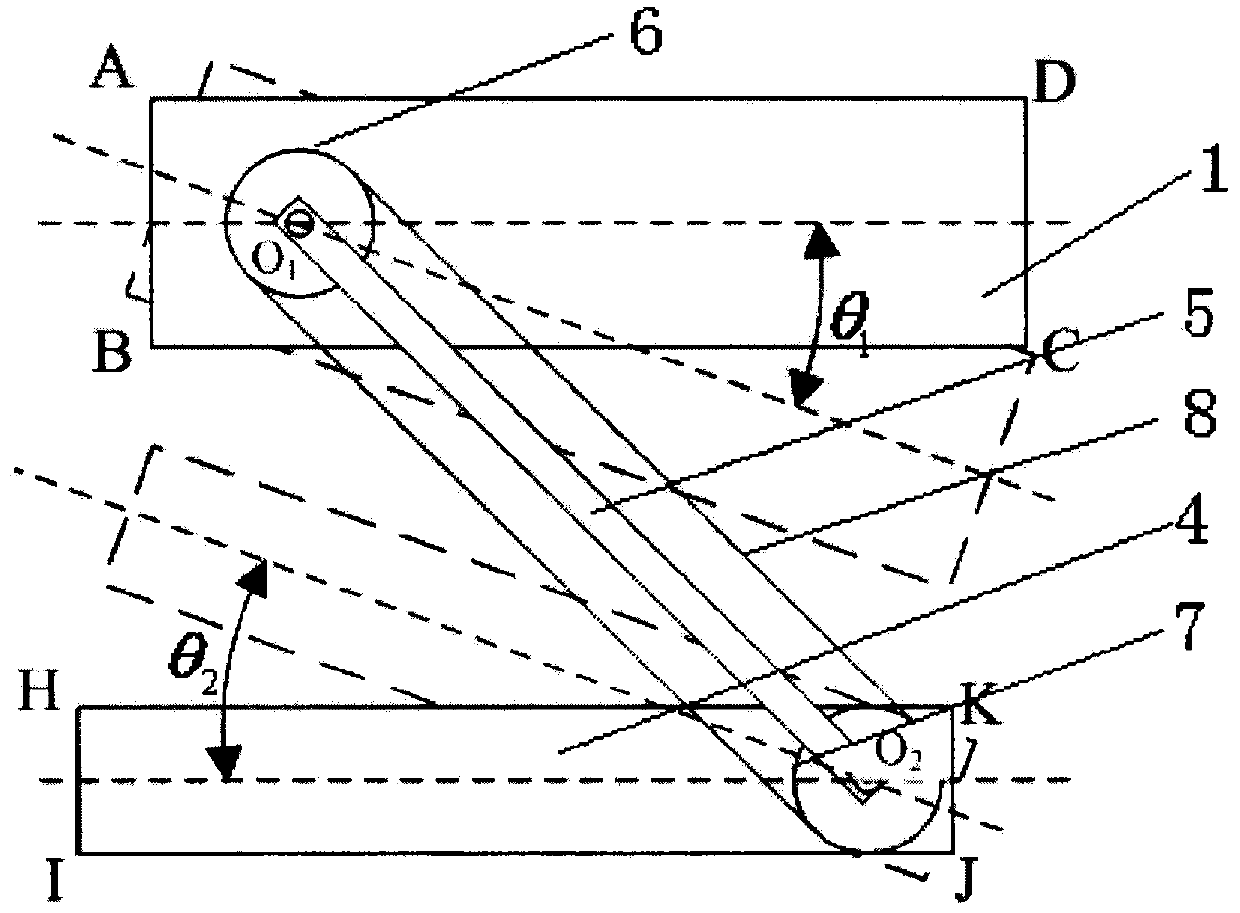
[0033] A kind of translation rotating leg up and down stairs robot of the present invention comprises fuselage 1, translational rotation leg structure, the ranging sensor 2 that is installed in the front of the fuselage, the proximity sensor 3 that is installed in the rear of the fuselage, as figure 1 , figure 2 and image 3 shown. There are one distance measuring sensor 2 symmetrically distributed to the left and right middle lines of the fuselage 1 , and one of the above-mentioned distance measuring sensors 2 is symmetrically distributed to the left and right middle lines of the fuselage 1 . In order to realize the corridor cleaning of the stair climbing process, a stair cleaning device 13 is arranged on the fuselage 1 below. The above-mentioned translational rotating leg structure includes a supporting leg 4 horizontally arranged at the initial position, a rotating arm 5 hinged with the supporting leg 4, a first sprocket 6 and a second chain respectively located at both ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More