All-directional movable manipulator with four feet
An omnidirectional moving, robotic arm technology, applied in the field of robotics, can solve the problems of unstable mobile platform, unsuitable for high-precision operation of robotic arms, etc., and achieve good ground adaptability, strong attitude adjustment ability, and good rigidity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
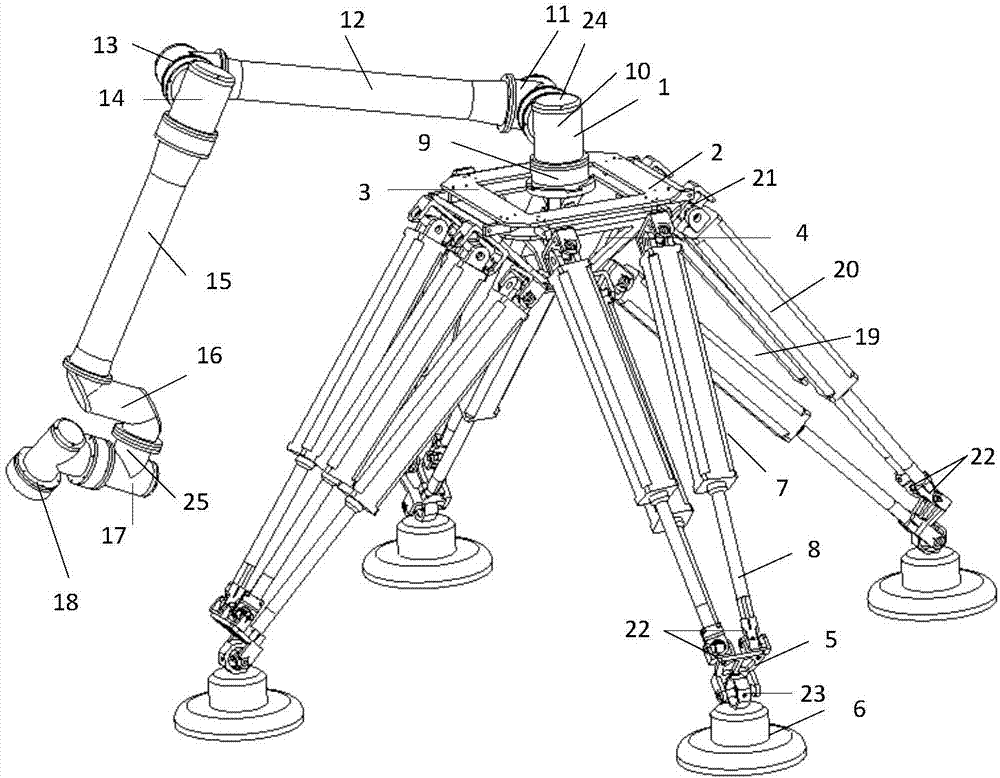
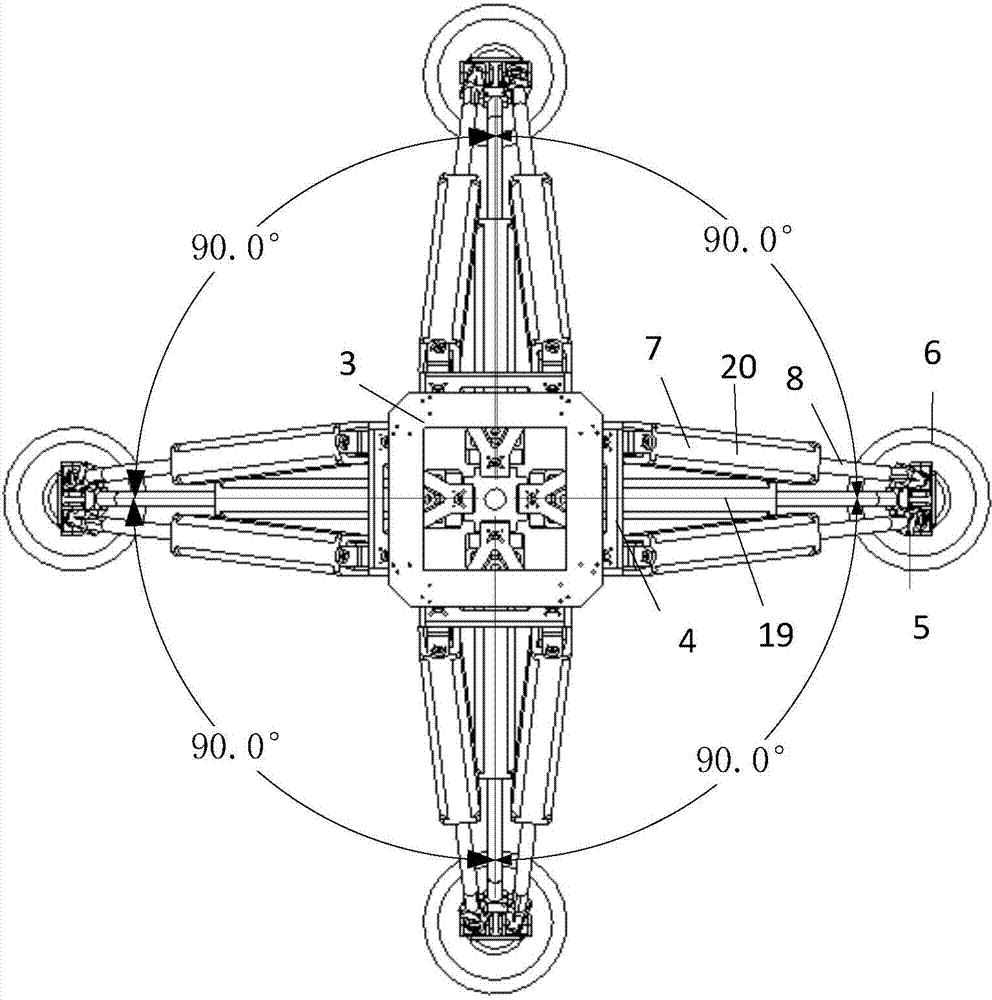
[0022] See attached figure 1 with 2 , the quadruped omnidirectional mobile manipulator includes a multi-degree-of-freedom manipulator 1 and a quadruped mobile platform 2 . The quadruped mobile platform includes a platform base 3 and four legs 19 in a parallel structure, and the legs 19 are symmetrically distributed on the circumference and installed under the side of the platform base 3, so that the mobile platform has the same movement ability on the entire circumference. The legs 19 in paralle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More