

Quick and simple method for solving inverse kinematics of six-degree-of-freedom mechanical arm
A kinematics inverse solution and robotic arm technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as unfavorable real-time control and slow solution speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
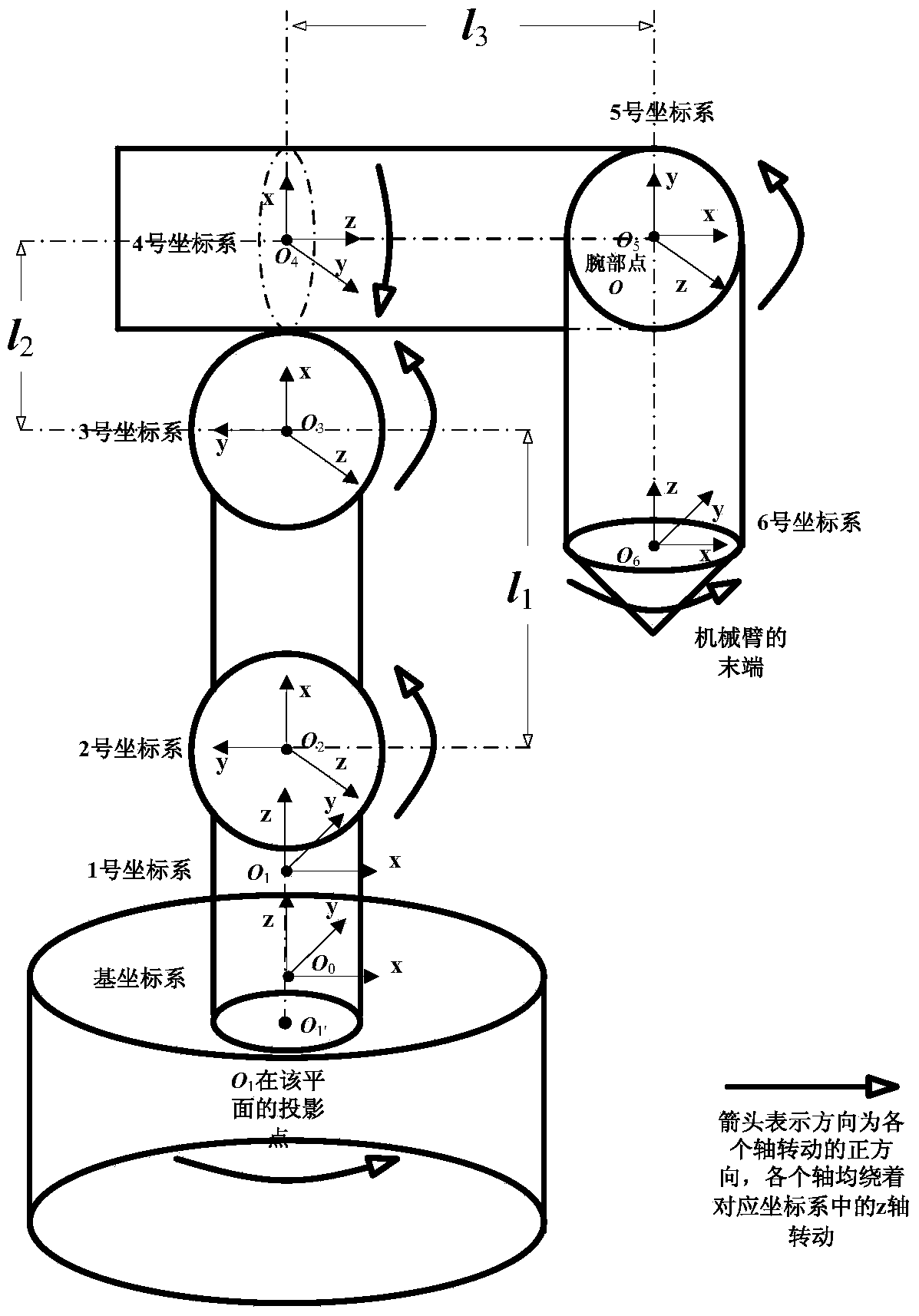
[0038] The present invention will be described in more detail below in conjunction with accompanying drawing example:
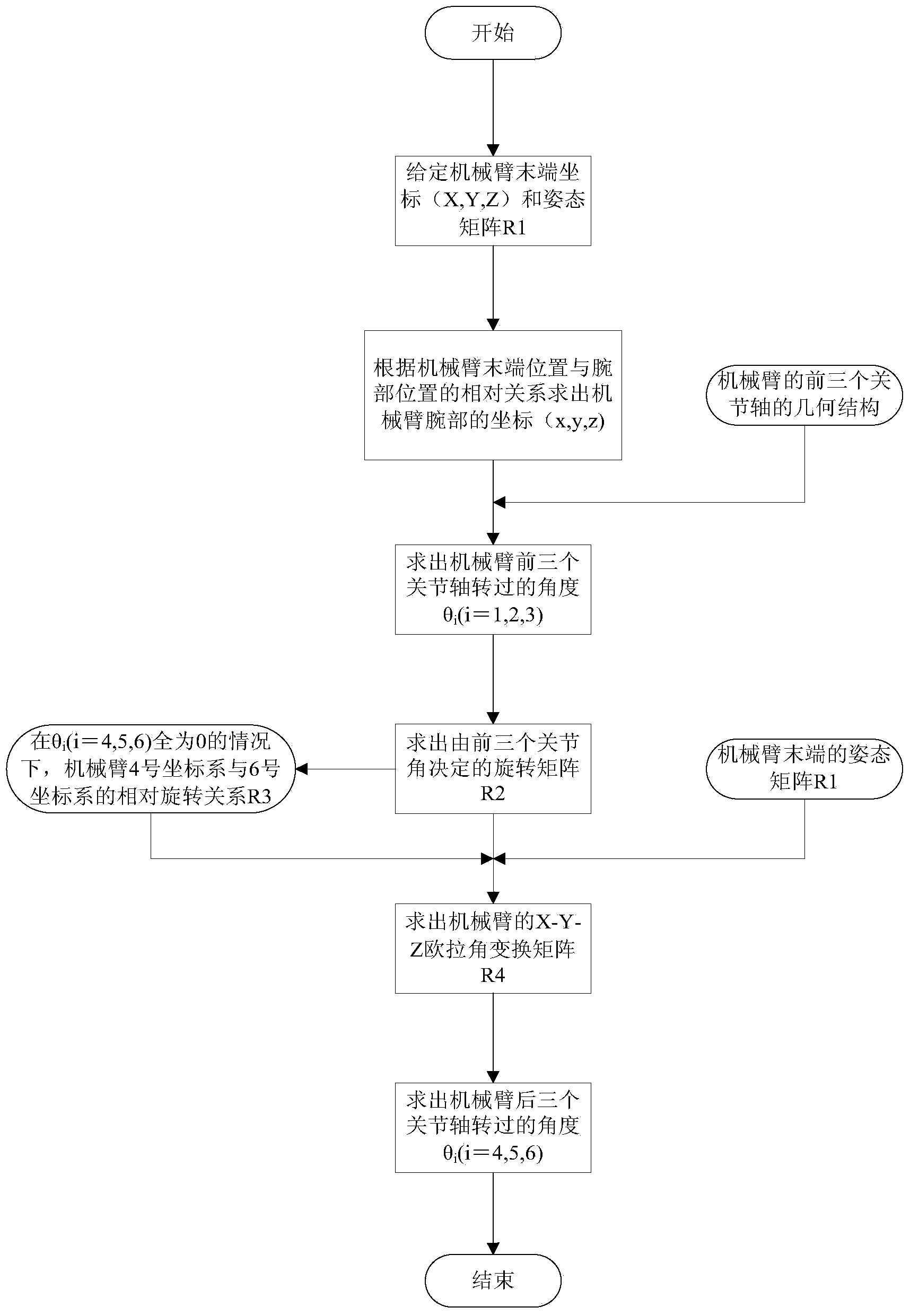
[0039] According to the position and attitude matrix of the end of the manipulator, the intersection points of the three joint axes at the end of the manipulator, that is, the position of the wrist of the manipulator, are calculated according to the position coordinates of the wrist of the manipulator and the geometric structure of the manipulator. The angle that the joint axis has turned, and then calculate the X-Y-Z Euler angle transformation matrix of the manipulator according to the obtained first three joint angles and the attitude matrix of the end of the manipulator, and use this matrix to find the last three joint angles.
[0040] The solution idea proposed by this method can be applied to six-degree-of-freedom manipulators with different geometric structures but belonging to the same category. This method greatly simplifies the solution process of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More