

Route planning method for multiple unmanned aerial vehicle cooperative tracking under multiple constraints
A multi-UAV, path planning technology, applied in the control of finding targets, vehicle position/route/altitude control, non-electric variable control, etc. Threats/obstacles UAV physical constraints, inability to achieve coordinated tracking of multiple UAV targets, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
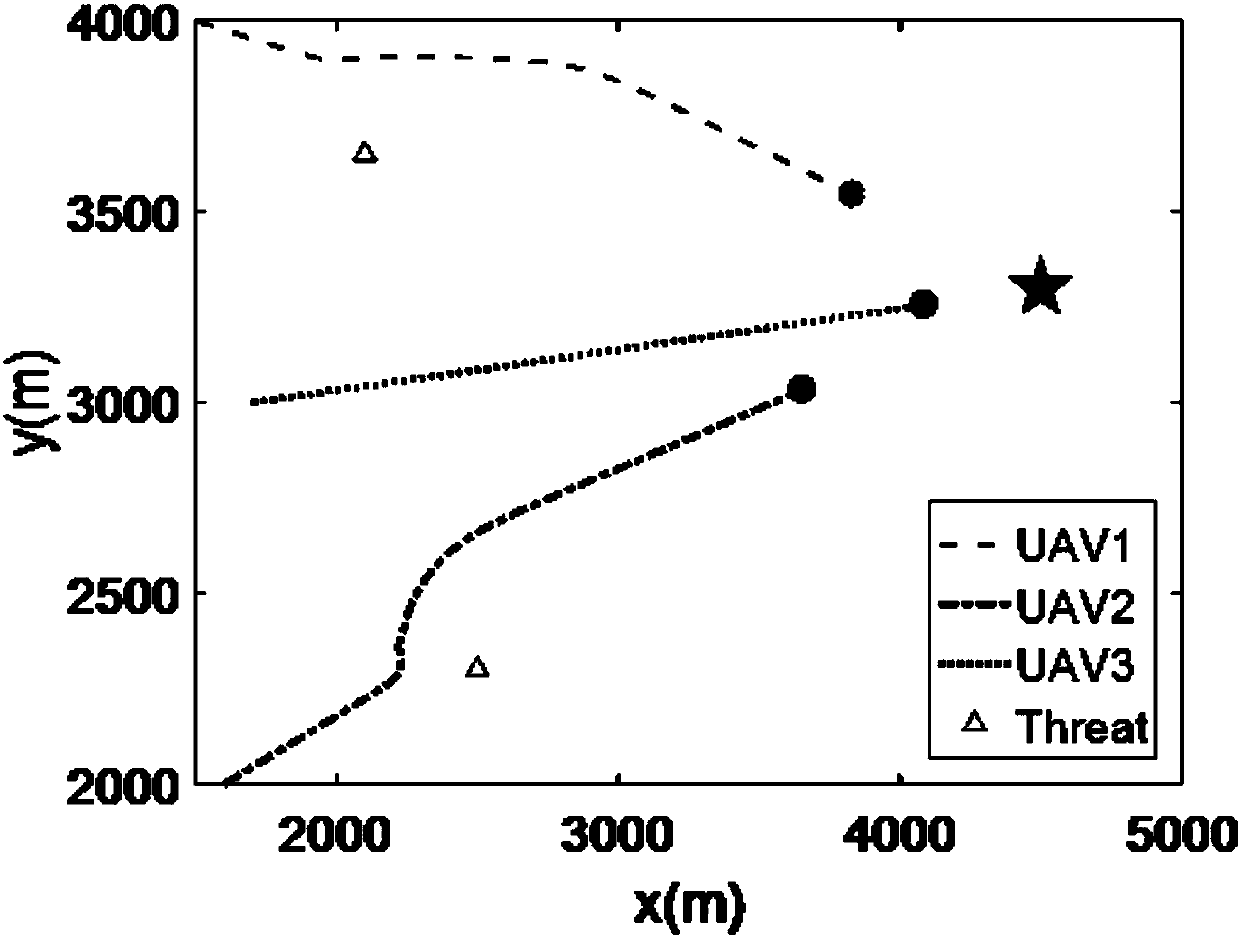
[0062] The present invention mainly adopts the method of simulation experiment to verify, and all steps and conclusions are verified correctly on Matlab2010. The present invention will be further described in detail with regard to specific embodiments below.
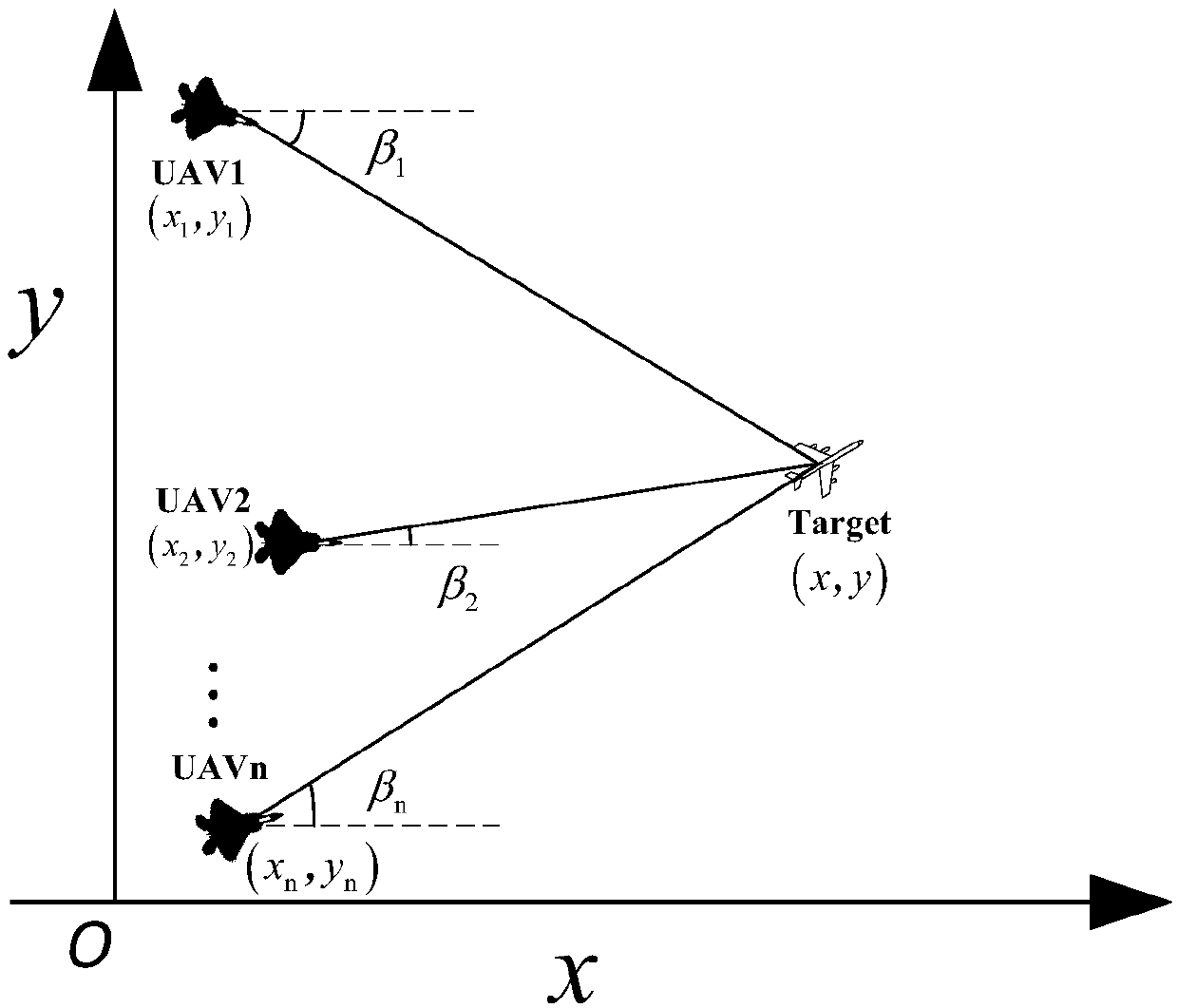
[0063] Step 1: Initialize the system parameters for the geometric structure of the multi-UAV tracking target at a certain moment.
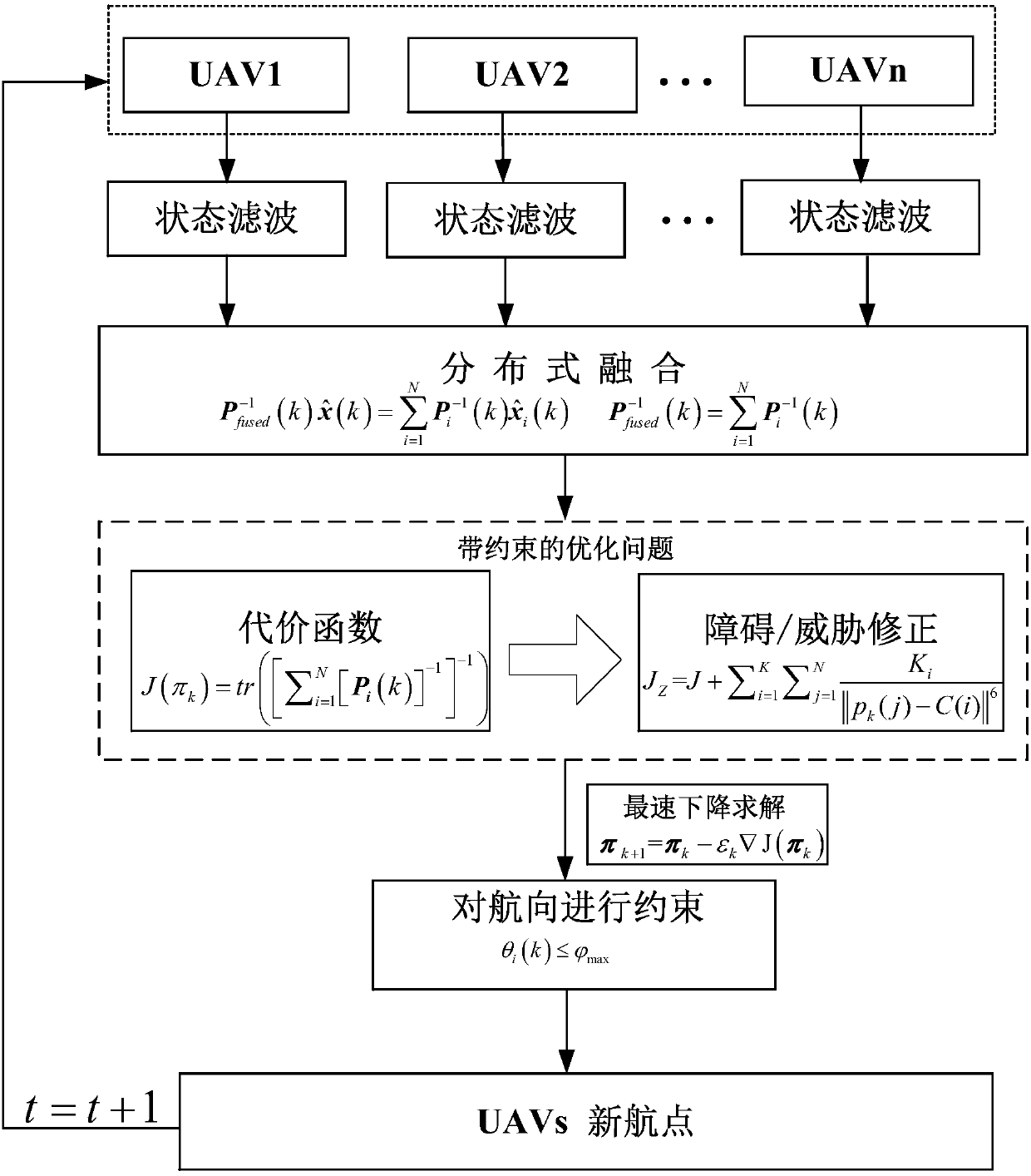
[0064] Step 2: Use the local extended Kalman filter to calculate the state estimation of each UAV to the target. First use expression (1) to calculate the one-step state prediction of the target state, then use expression (3) to determine the one-step prediction error covariance matrix, then use expression (5) to calculate the Kalman gain, and then use expression (8) to calculate One-step state prediction of the target state, and then use the formula (7-9) to get the state estimation of each UAV to the target, and finally use the expression (10) to get the error covariance matrix of each UA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More