

Self-force source driven interactive paraplegia walker exoskeleton
A self-powered, interactive technology, applied in the field of medical machinery, can solve the problems of high driving force and energy consumption, consumption of patients' physical energy, and difficulty in patients' application, so as to achieve the effect of reducing physical energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
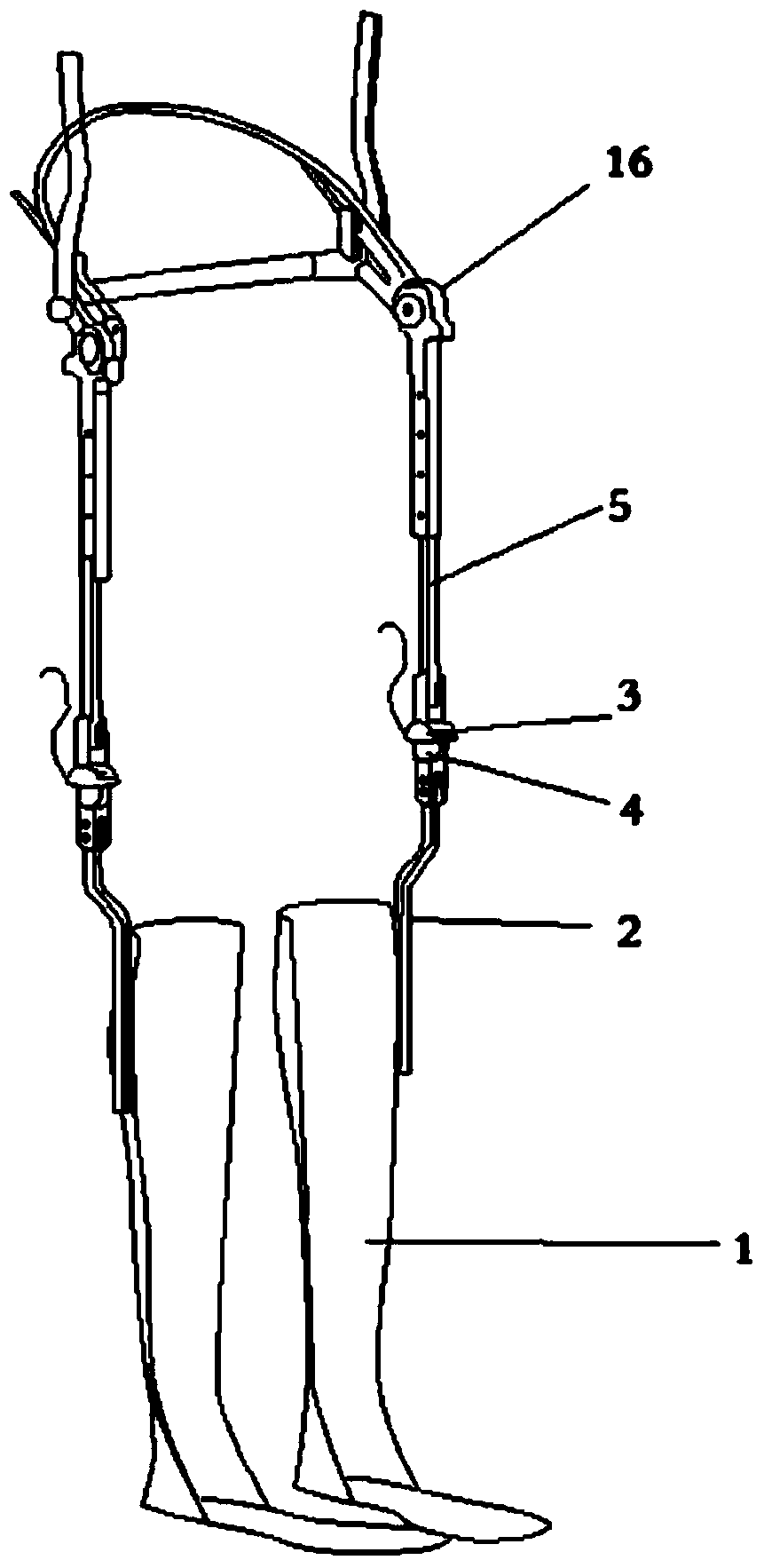
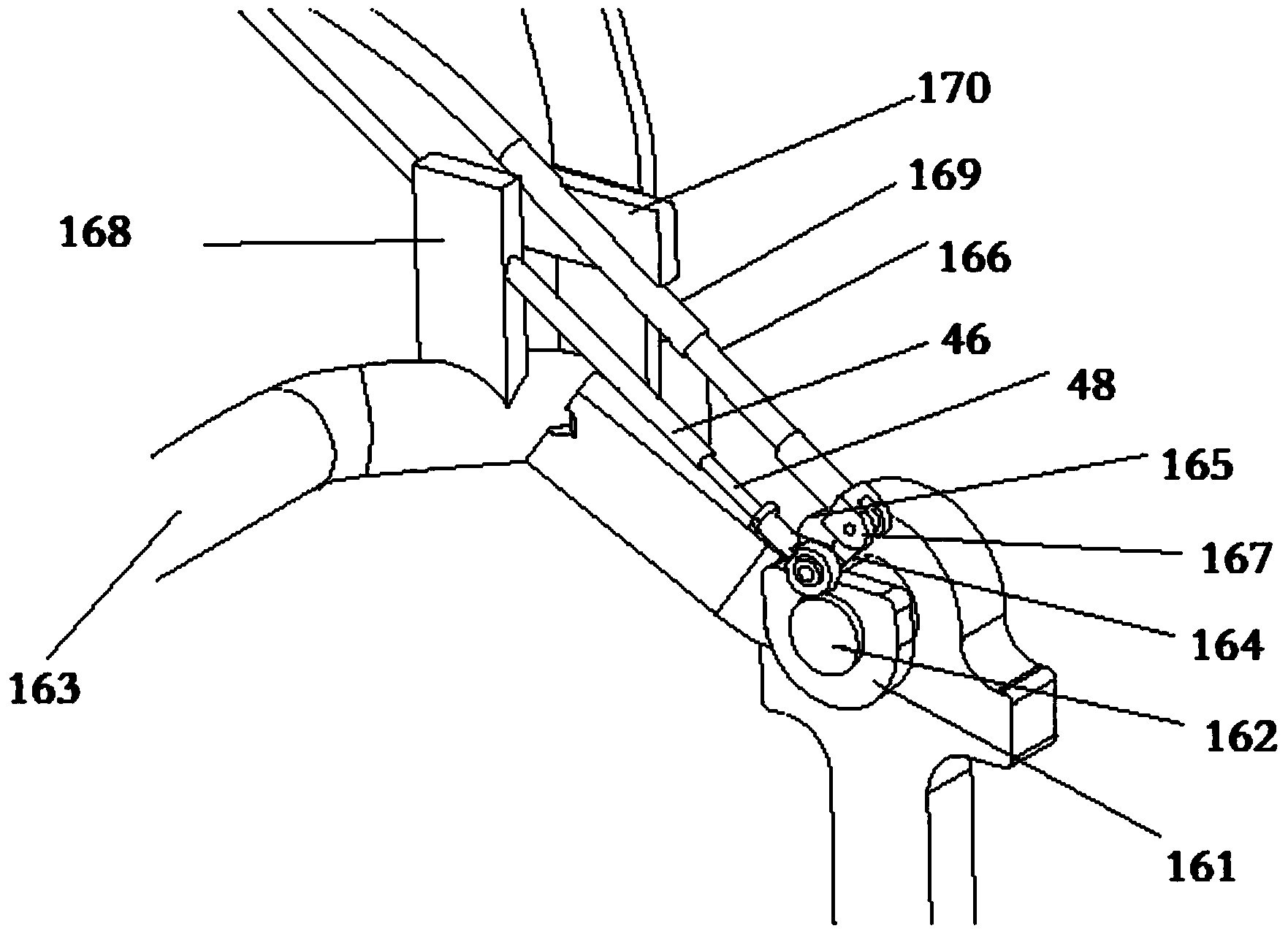
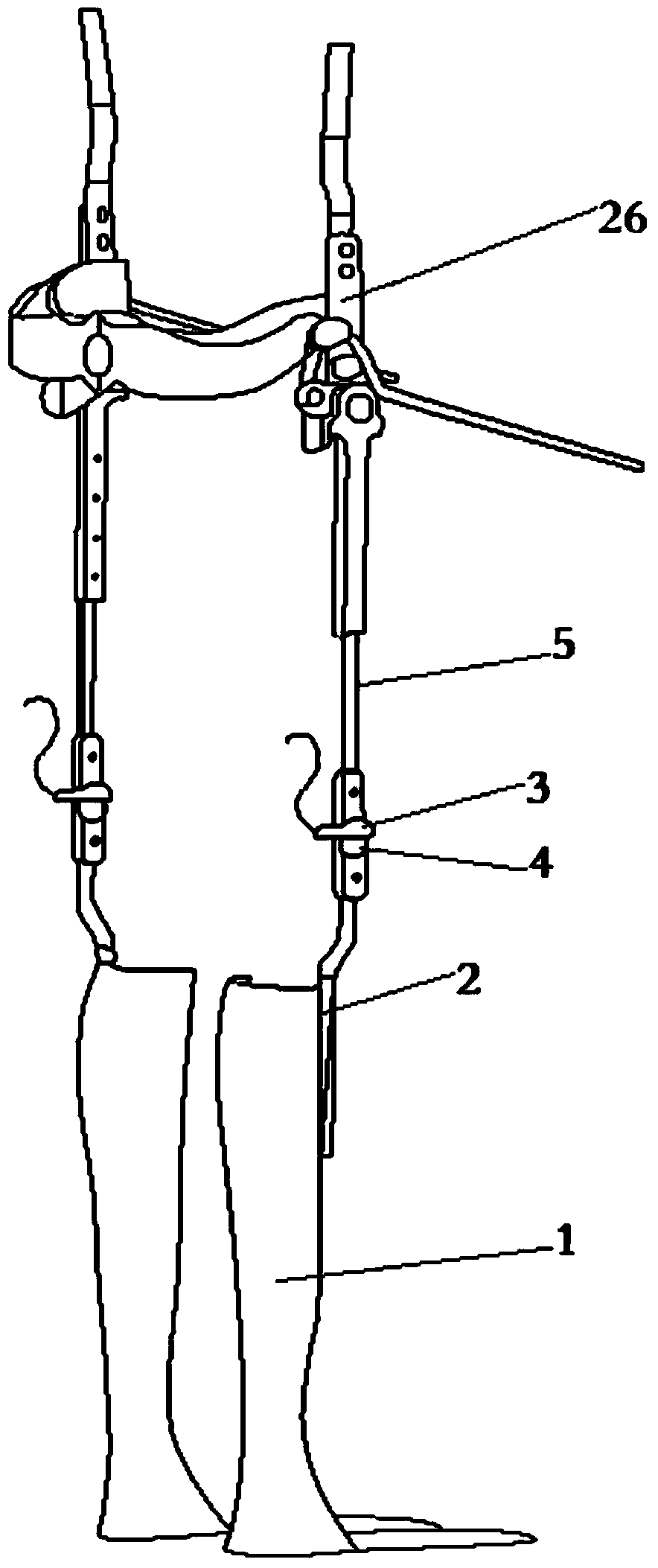
[0023] Such as figure 1 , figure 2 and Figure 7As shown, the self-power source-driven interactive cinch RGO paraplegic walker exoskeleton described in the embodiment of the present invention is composed of a rollator driven by its own power source and a cinch RGO driven by its own power source. The driven rollator consists of the front frame 42, the rear frame 44, the vehicle center beam 45 that connects the left and right frames into one, and the self-power source drive mechanism that is fixed on the front frame 42 and the rear frame 44 through the interactive hinge 51. Composition, the self-power source drives the interactive hinge 51 to connect the interactive arm 52, the power hinge 49 on the interactive arm 52 is connected to the power pull rod 48, and the power pull rod 48 is fixed on the power pull rod sleeve on the rollator through the power pull rod cover support 47 46 is operated by the left and right arms of the patient, and the center of gravity of the parapleg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More