

Fully-passive six-degree-of-freedom main manipulator
A main operator and degree of freedom technology, applied in the field of medical devices, can solve the problems of large volume, small working space, and limited application range of the main operator, and achieve a compact overall structure, small space occupation, and simple and reliable zeroing method Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0019] Embodiment: The following is a description of the implementation of the present invention by specific specific examples. Those skilled in the art can easily understand other advantages and effects of the present invention from the contents disclosed in this description. The "first" mentioned in this embodiment , "second", "third", "fourth" and other descriptions are to distinguish each joint from the connecting rod; "one end" and "the other end" of the connecting rod refer to the two ends of the connecting rod, that is, the head and the connecting rod. The difference between the tail, these words indicating the orientation are only for the convenience of description and clarity, and are not used to limit the scope of the present invention. The change or adjustment of the relative relationship is also regarded as the present invention without substantial change in the technical content. scope of implementation.
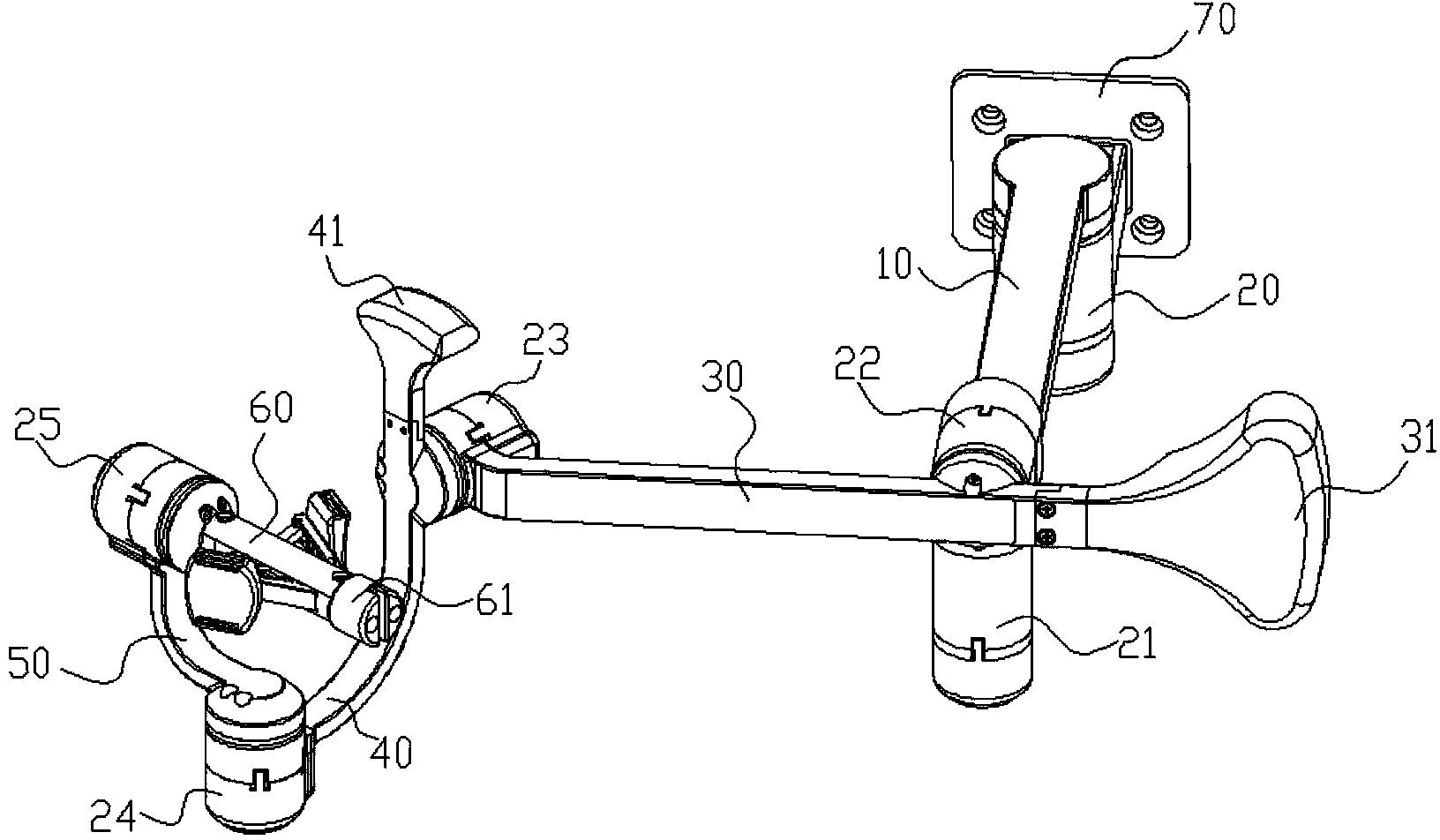
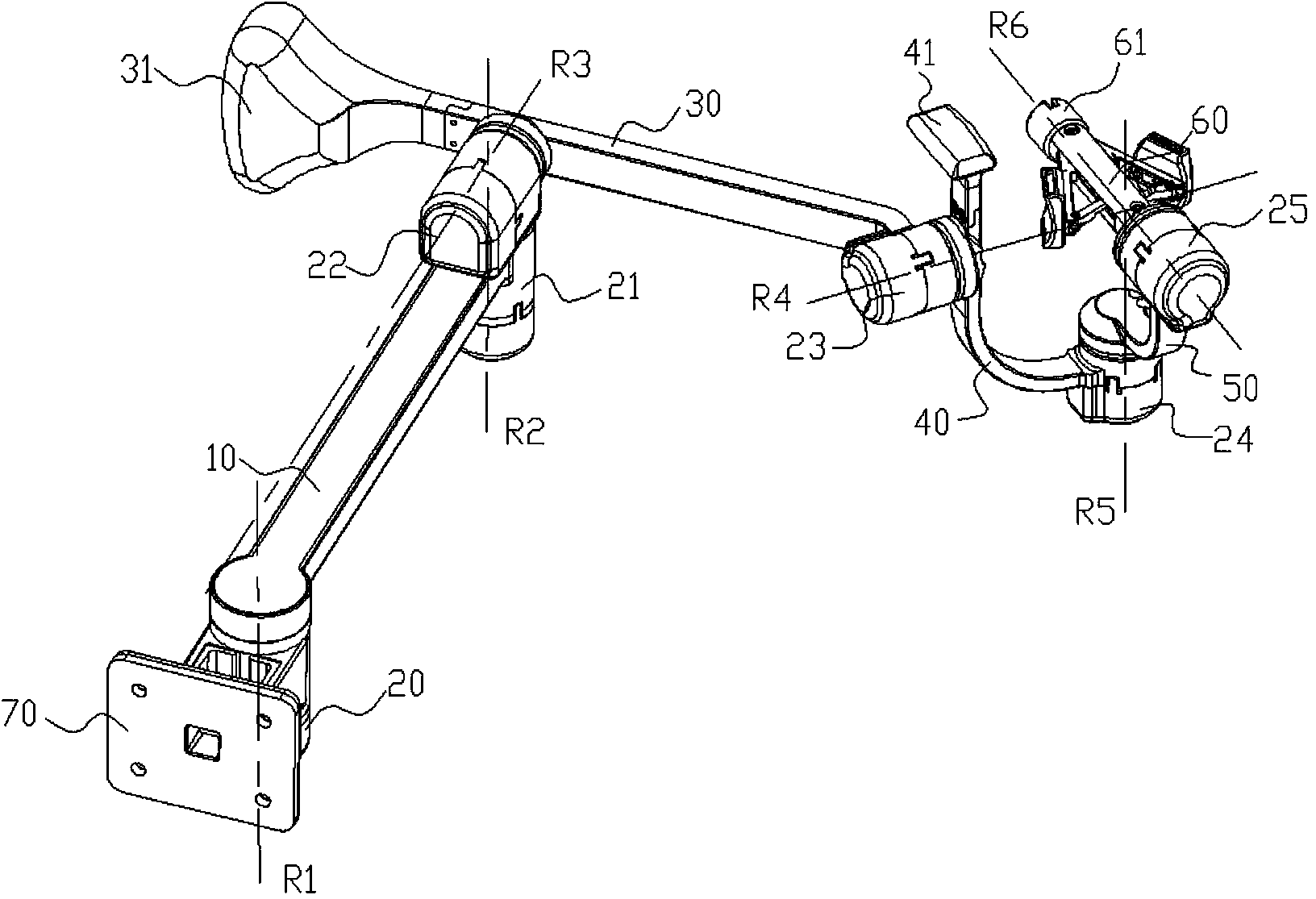
[0020] See Figure 1 to Figure 2 As shown, the full passi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More