

A Method of Navigation and Positioning Using Gravity Vector and Gradient Tensor
A gradient tensor and gravitational gradient technology, applied in the field of navigation and positioning, can solve problems such as ineffective elimination of influence and component value differences, and achieve the effects of facilitating navigation and positioning, weakening the influence of attitude errors, and good autonomy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
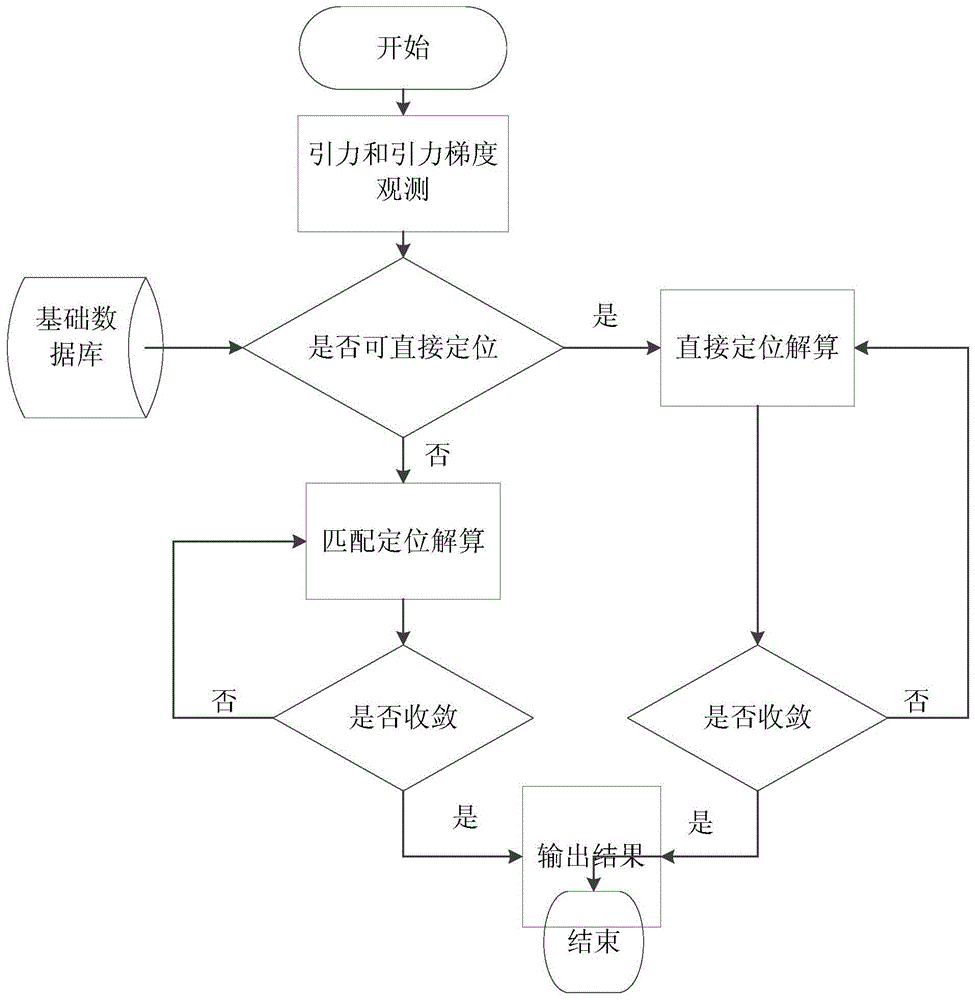
[0039] Such as figure 1 Shown, main embodiment of the present invention is as follows:
[0040] (1) First, establish the 3D information of the background field of the target area according to the existing observations, and the quantities used mainly include
[0041] The following three sets of invariants:
[0042]
[0043] where: g i ,v i,j (i, j=x, y, z) are the gravitational vector and gravitational gradient tensor components of each point in the target area that have been observed in advance, which can be values in any coordinate system, and can also be tried using background field data Construct the corresponding mathematical model. The elements of the final basic database are: (x, y, z) or (r, θ, λ), (g, B, C).
[0044] (2) Using the real-time observation data, formula (1) is used to calculate the gravitational vector invariant and two gradient tensor invariants of the point to be located;
[0045] (3) To judge the feasibility of direct positioning, it is mainl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More