

Vehicle collision preventing method based on collaborative relative positioning technologies
A relative positioning and anti-collision technology, applied in the field of intelligent transportation, can solve the problems of reducing absolute positioning accuracy, GPS satellites and vehicle line-of-sight path blocking, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
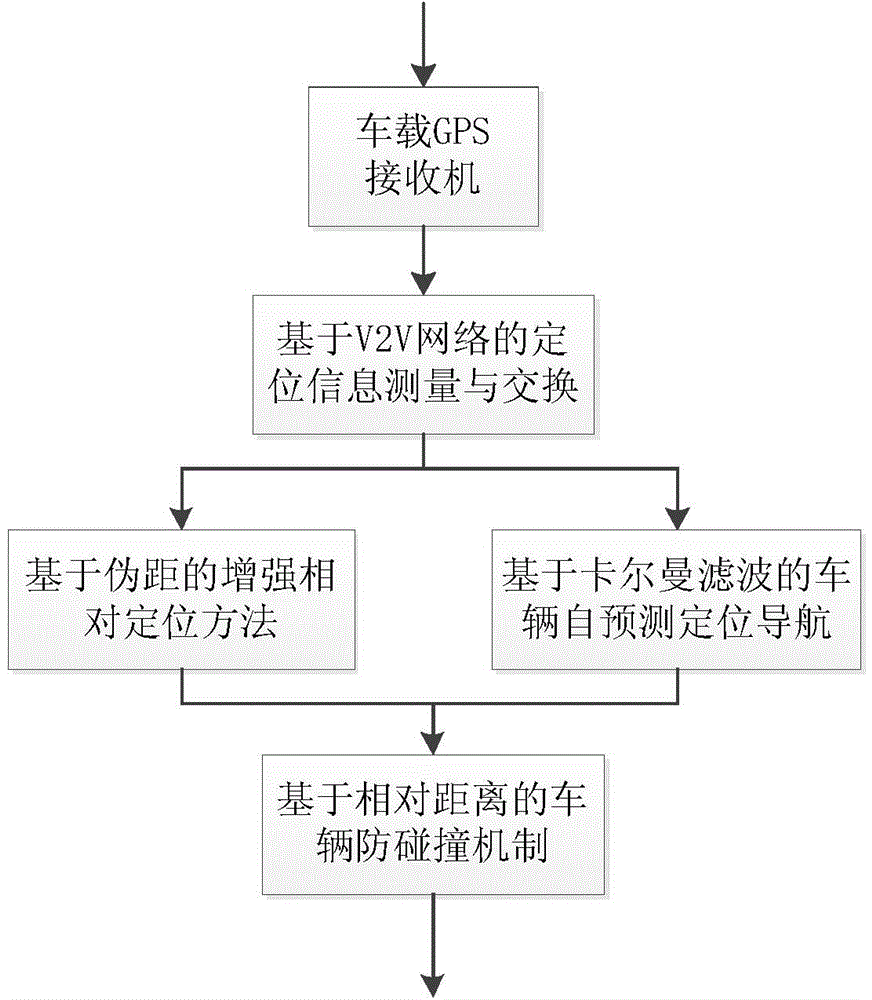
[0036] Embodiment 1: as figure 1 As shown, a vehicle collision avoidance method based on cooperative relative positioning technology, including: positioning information measurement and exchange based on V2V network, enhanced relative positioning method based on pseudorange, vehicle self-predictive positioning and navigation method based on Kalman filter, based on The relative distance vehicle anti-collision judgment mechanism specifically includes the following steps:
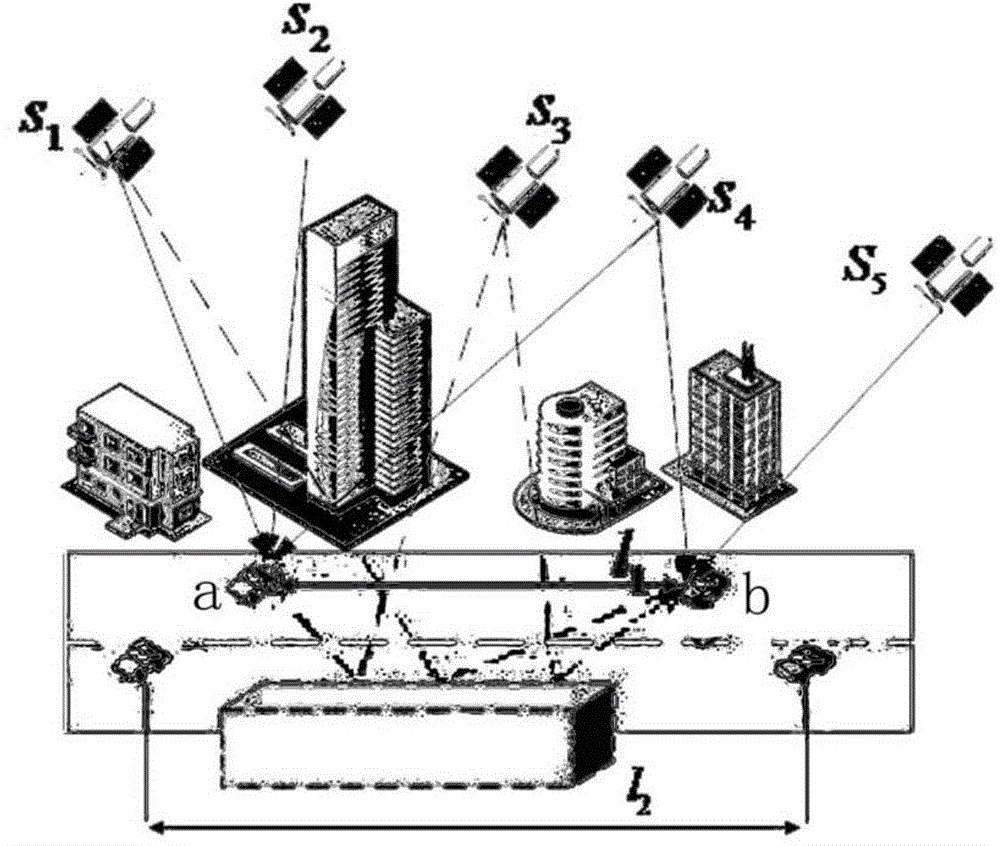
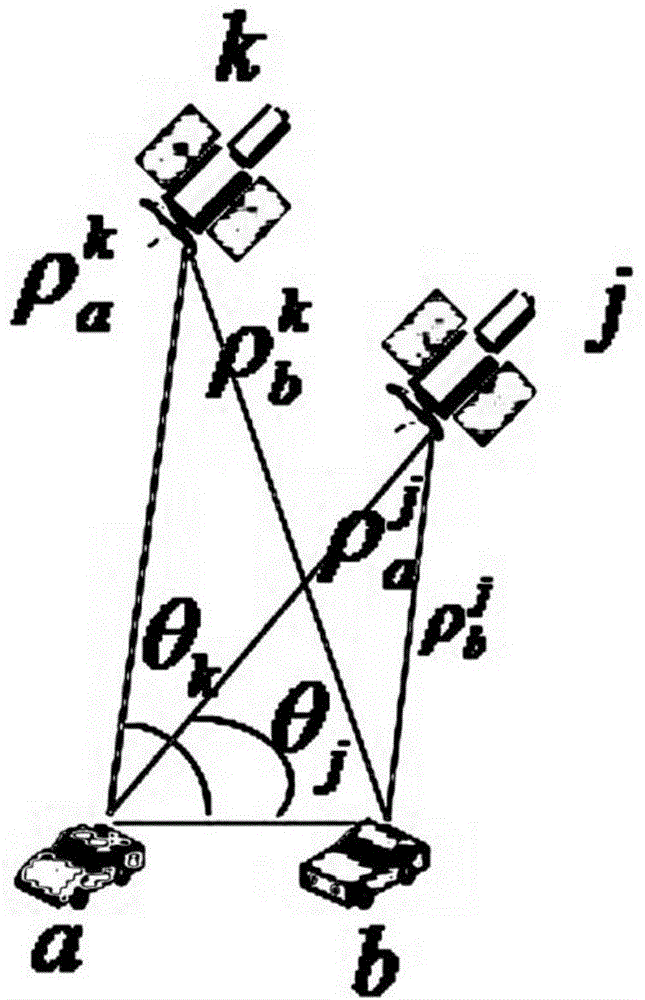
[0037] 1) Analyze the satellite information received by the first vehicle and the second vehicle in relative positioning, determine the shared in-orbit satellites of the first vehicle and the second vehicle, and establish a cooperative relative positioning system model;
[0038] 2) The first vehicle and the second vehicle establish a V2V network, and transmit data packets through the shared on-orbit satellite. The data packet information includes: vehicle identification ID, absolute positioning coordinates of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More