

Underwater operation robot
An underwater robot and underwater operation technology, applied in the field of robotics, can solve problems such as slow response time, poor stability, and cumbersome control, and achieve the effects of rapid response, high static stability, and flexible control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
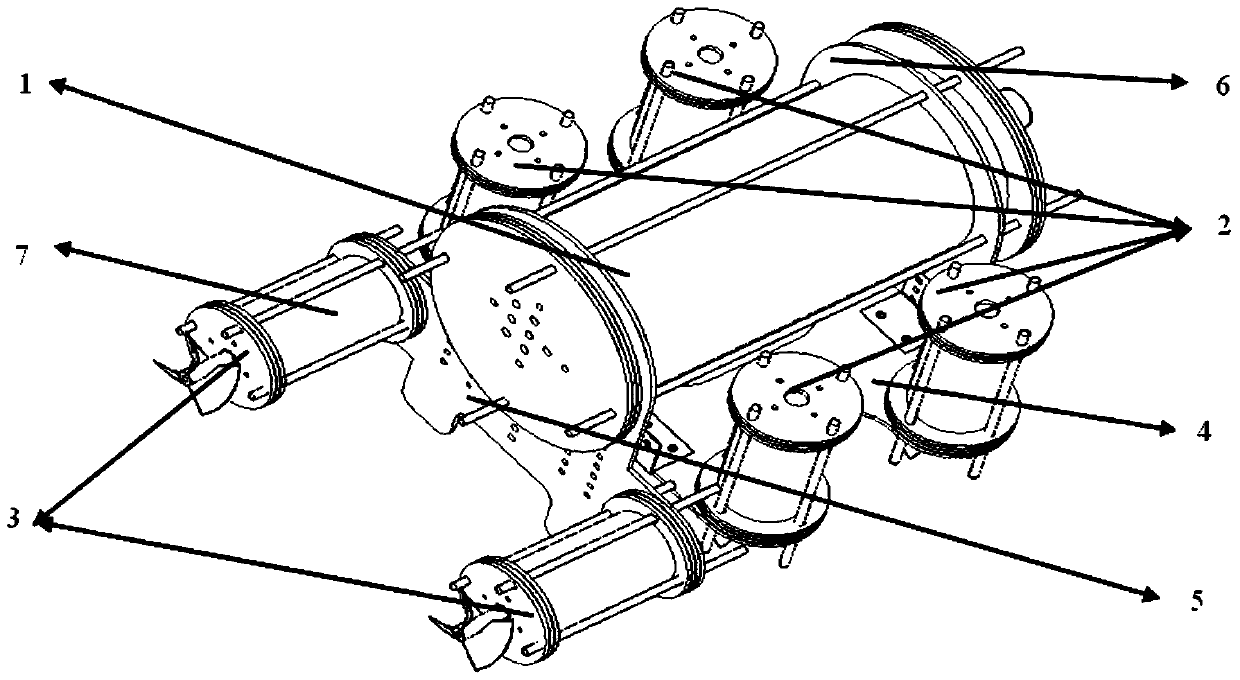
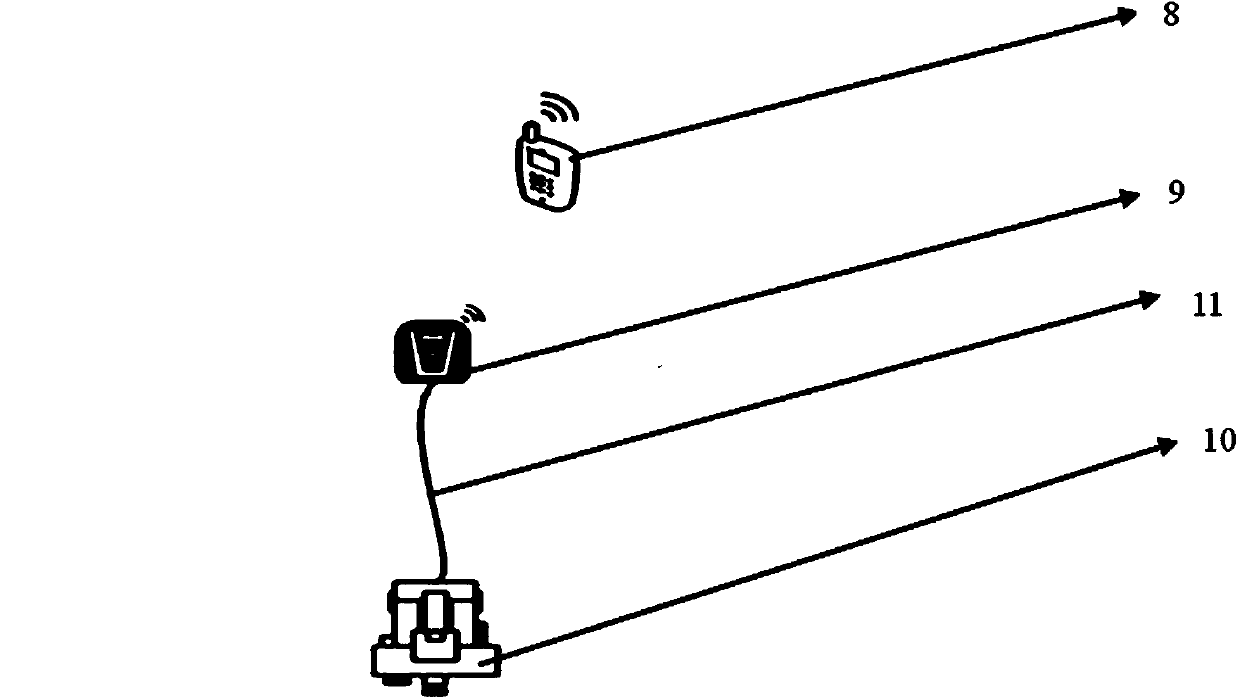
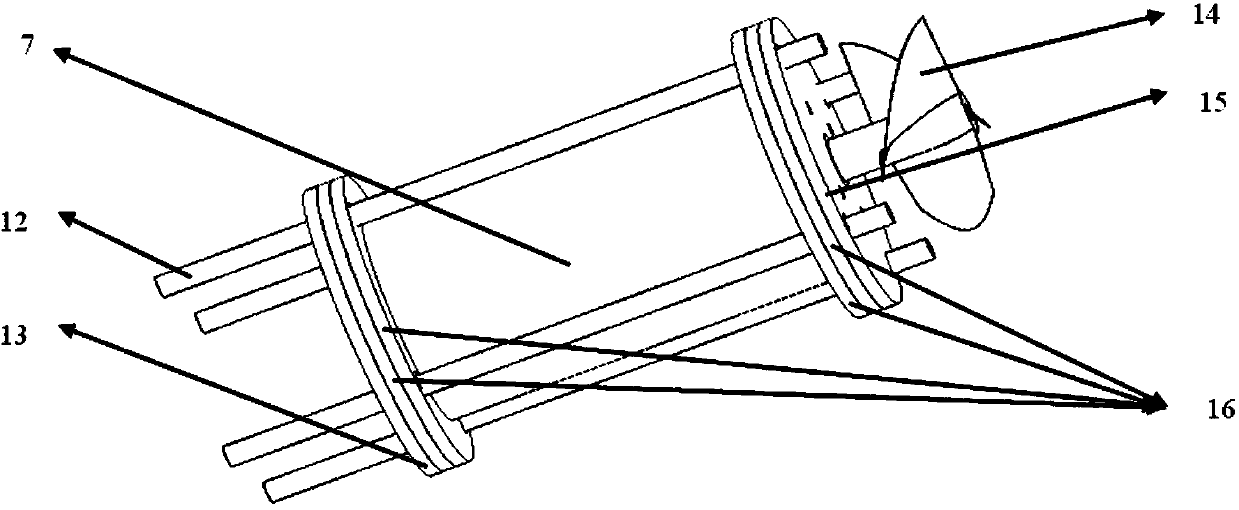
[0020] Such as figure 1 , figure 2 and image 3 As shown, the present invention provides a kind of underwater robot 10, by the fuselage 1 with sealed compartment, described fuselage 1 is equipped with the control system that is used to wirelessly receive import program instruction, this control system has motor drive circuit, four One vertical propeller propeller 2 and two front and rear propeller propellers 3, bottom plate 4, front splint 5 and rear splint 6 are composed, and the four vertical propeller propellers 2 are vertically and symmetrically fixed on the bottom plate 4 of the underwater robot. on the boss. The two front and rear propeller propellers 3 are placed horizontally and symmetrically on both sides of the front splint 5; the counterweight of the underwater robot is connected between the front splint 5 and the rear splint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More