Flexure elements for series elastic actuators and related methods
A technology of bending elements and actuators, applied in the direction of instruments, program control manipulators, joints, etc., can solve problems such as permanent deformation, non-uniform distribution, fatigue failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
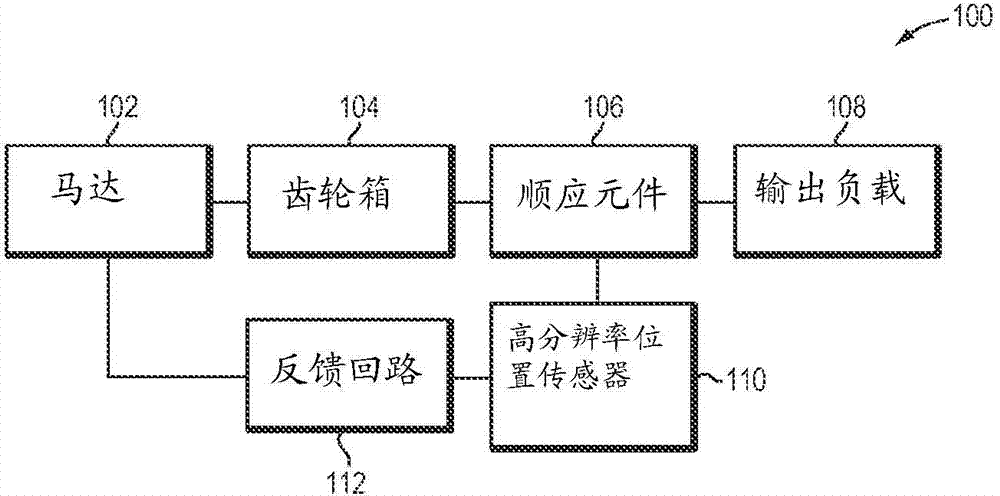
[0020] See you again figure 1 , which shows a robotic actuator 100 having a motor 102 , a gearbox 104 , a compliant element such as a series elastic actuator (SEA) 106 and an output load 108 coupled in series. Gearbox 104 is configured to transfer motion from associated motor 102 to motion of output load 108 through compliant element 106 . The load 108 may be any suitable load such as a robot link or joint. The positional deflection of compliant element 106 may be measured by position sensor 110 . If the stiffness constant (eg, spring constant or Young's modulus) is known, the force / torque applied by the motor 102 can be determined. A force / torque feedback loop 112 may be employed such that the desired force / torque is generated by the motor 102 and transmitted via the compliant element 106 .
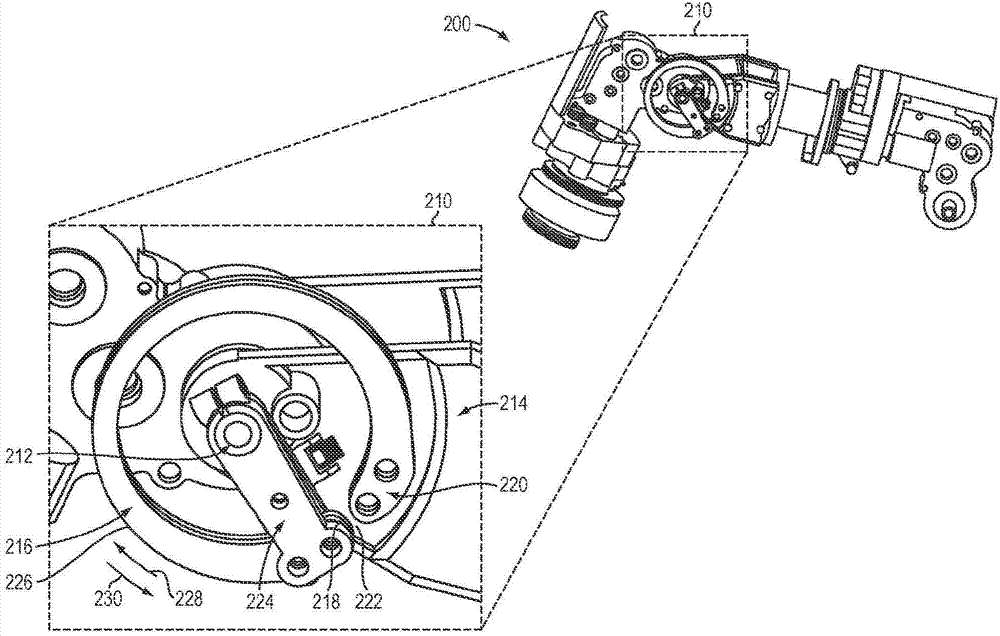
[0021] Figure 2A Depicted is a portion 200 of a robotic system comprising a flexure joint 210 according to an embodiment of the invention. In the illustrated construction, gearbox...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com