

Square Root Higher Order Volumetric Kalman Filter Method with Unknown Measurement Noise Variance
A technology of unknown measurement noise and Kalman filtering, applied in impedance networks, adaptive networks, electrical components, etc., can solve problems such as filtering of nonlinear systems with unknown measurement noise variance, to improve numerical stability, improve operating efficiency, and solve Effects of Filtering Problems in Nonlinear Systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
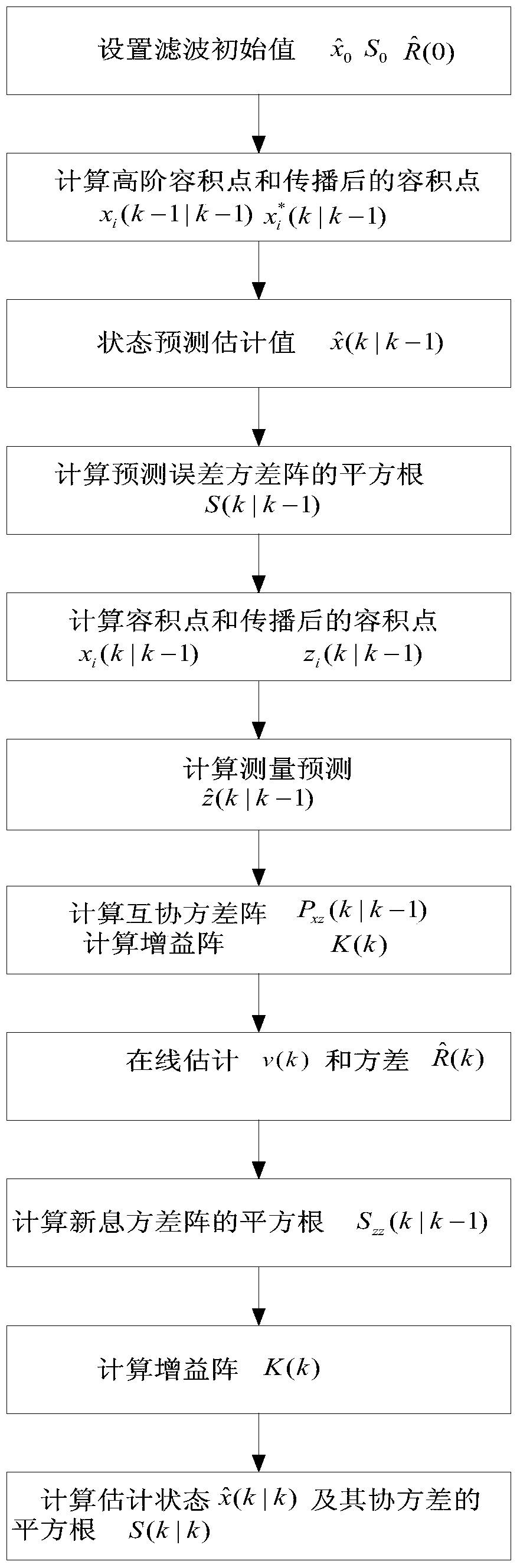
[0023] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0024] refer to figure 1 , let the state-space model of the nonlinear dynamic system be:
[0025] x(k+1)=f(x(k))+w(k)
[0026] z(k)=h(x(k))+v(k)
[0027] In the above formula, x(k)∈R n is the target state, z(k)∈R m Indicates the measured value; f: R n →R n is a nonlinear state evolution process, h:R n →R m is the corresponding nonlinear measurement mapping; the process noise w(k)∈R n is Gaussian white noise with zero mean, and its variance is Q(k); measurement noise v(k)∈R m is white Gaussian noise with zero mean, but the time-varying variance R(k) is unknown.
[0028] The process noise and measurement noise are assumed to be uncorrelated in the system model. The initial state x(0) of the system means x 0 , the variance is P 0 , and is independent of w(k) and v(k).
[0029] Below, based on the system model, the specific implementation step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More