

Dual-booting robot self-charging method
An autonomous charging and robot technology, applied in two-dimensional position/channel control and other directions, can solve the problems of power transmission decline, low efficiency, loose contact of joints, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
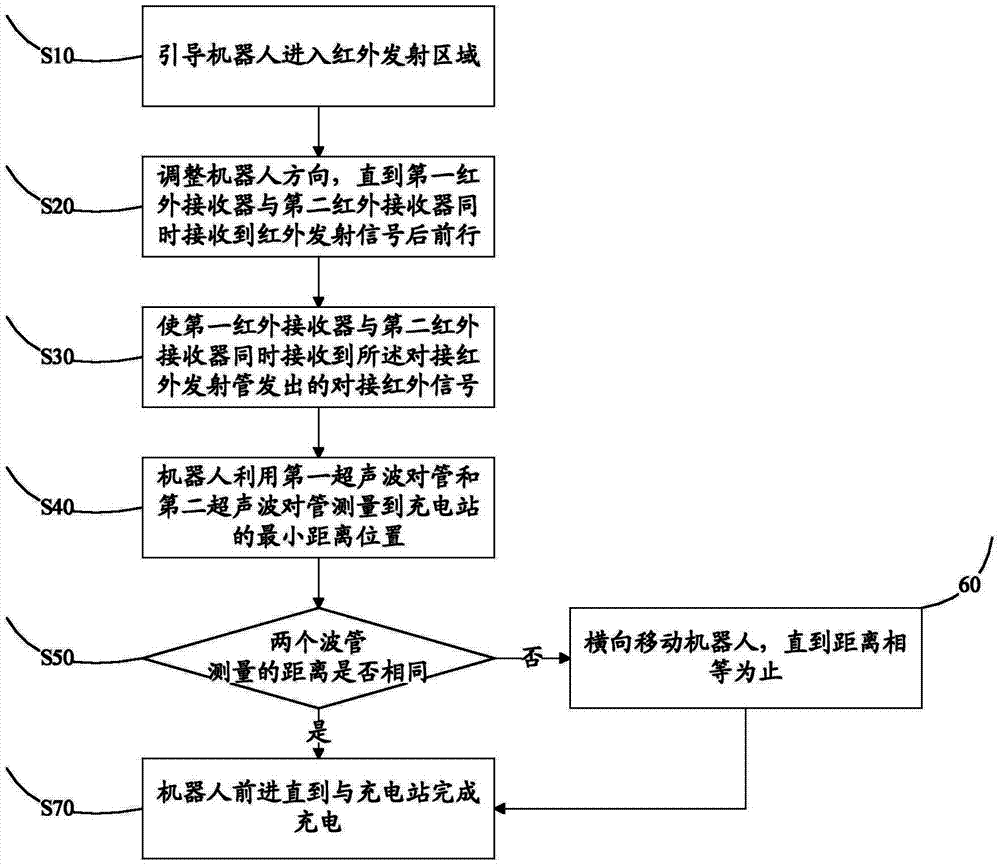
[0027] refer to figure 1 As shown, a robot autonomous charging method based on dual guidance includes a robot 10 and a charging station 20, and four infrared receivers and two pairs of The ultrasonic pair tubes are respectively the first infrared receiver 11, the second infrared receiver 12, the third infrared receiver 13 and the fourth infrared receiver 14, and each receiver can receive infrared signals in the range of 90 degrees, so , the robot can receive infrared signals in the surrounding 360-degree range, as well as the first ultrasonic pair tube 15 and the second ultrasonic pair tube 16. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More