

Indoor multi-dimensional orbital intelligent inspection robot
An inspection robot and intelligent inspection technology, applied in two-dimensional position/channel control and other directions, can solve problems such as difficulty in long-distance movement and grabbing by grasping devices, complex structure of transmission mechanism, and difficulty in accurate inspection of equipment. , to achieve the effect of being conducive to maintenance and promotion, simple structure, and large adoption rate of standard parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
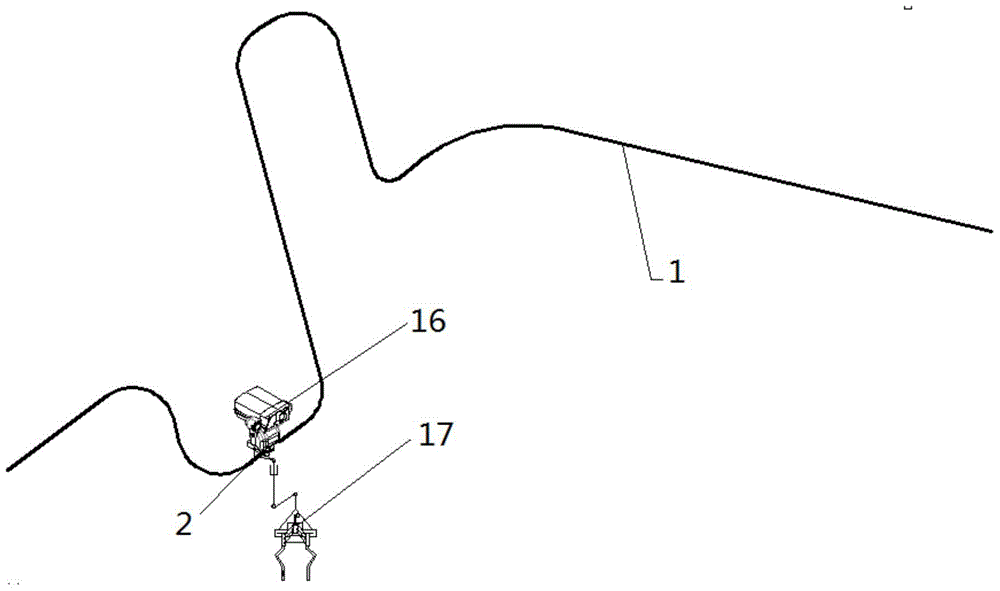
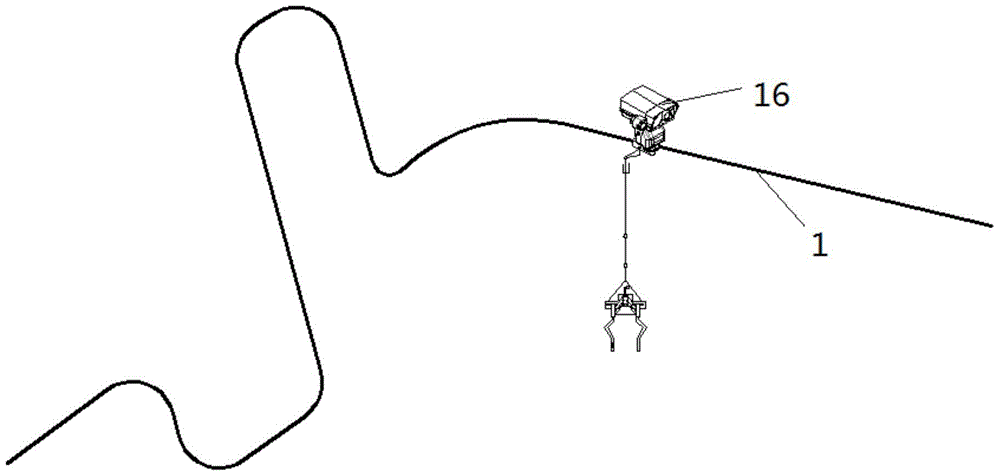
[0076] Such as Figure 1-2 As shown, the grabbing process schematic diagram of the present invention.
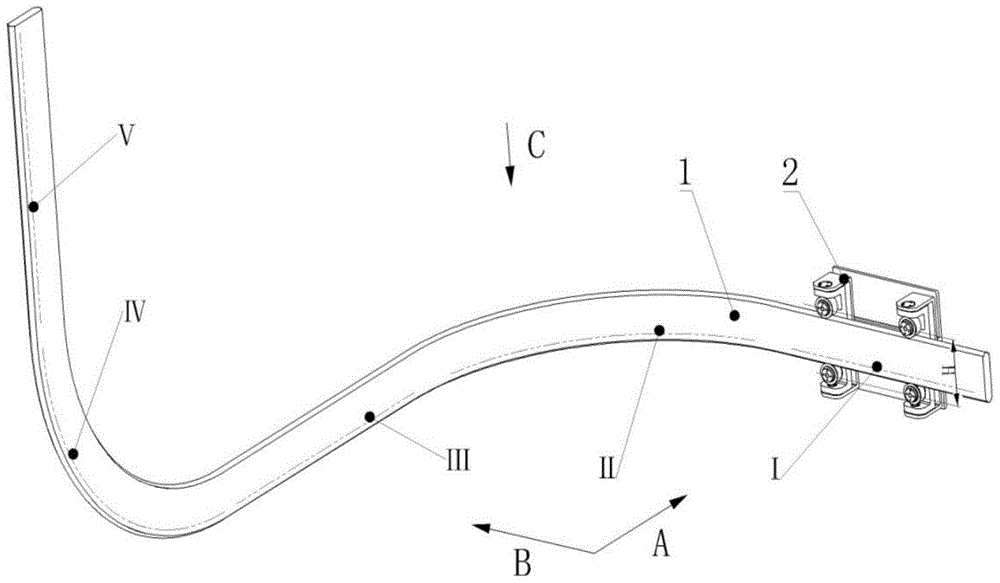
[0077] An indoor multi-dimensional track-type intelligent inspection robot, comprising an inspection robot body 16, the inspection robot body 16 is fixed on a mobile platform 2, and the mobile platform 2 slides on the indoor side wall multi-dimensional track, and the mobile platform 2. Connect to the motion driving device 22, the motion driving device 22 is connected to the control system, the motion driving device is connected to the power supply device, the inspection robot body is provided with a pan platform 19, and the pan platform 19 is provided with a detection component 18. A multi-link grabbing device 17 is provided under the mobile platform.
[0078] Such as Figure 11 As shown, the control system includes a motion control box 23, and the motio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More