A system-level calibration method for redundant inertial navigation system accelerometers based on velocity observation
A system-level calibration and accelerometer technology, applied in the field of inertial navigation, can solve the problems of no longer applicable, cumbersome calibration methods, and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0077] See Figure 7 , the present invention is a kind of redundant inertial navigation system accelerometer system-level calibration method based on speed observation, and it comprises the following steps:
[0078] Step 1: Install the optical fiber strapdown inertial group on the turntable, and determine the initial position parameters of the carrier, including longitude, latitude, etc.;
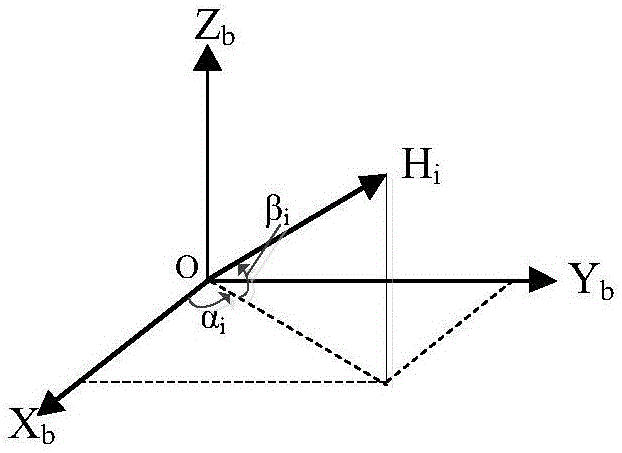
[0079] Step 2: Determine the installation relationship between the axial direction of the accelerometer and the coordinate system of the system body, that is, the installation angle, and calculate the installation matrix;
[0080] Step 3: preheat the fiber optic strapdown inertial group, and prepare to collect accelerometer output data for fine calibration on the basis of the existing rough calibration parameters (zero offset, scale factor, misalignment angle, etc.) of the accelerometer (rough calibration is completed);
[0081] The data output by the accelerometer is the specific force f ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More