

An Inverse Synthetic Aperture Radar Azimuth Calibration Method
An inverse synthetic aperture and azimuth technology, applied in the direction of reflection/re-radiation of radio waves, use of re-radiation, measurement devices, etc., can solve the problem of inability to perform correct estimation, not considering the compensation of the secondary phase term, and the complex motion estimation error of the target large problems, to achieve the effects of accurate imaging results, short time, and high estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
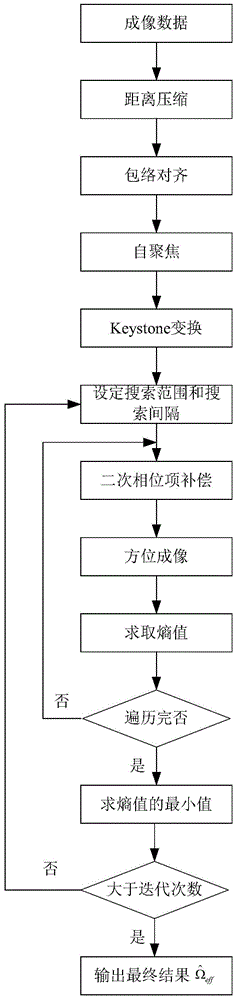
[0028] The present invention adopts the estimation method of the effective rotation speed based on the minimum entropy principle.
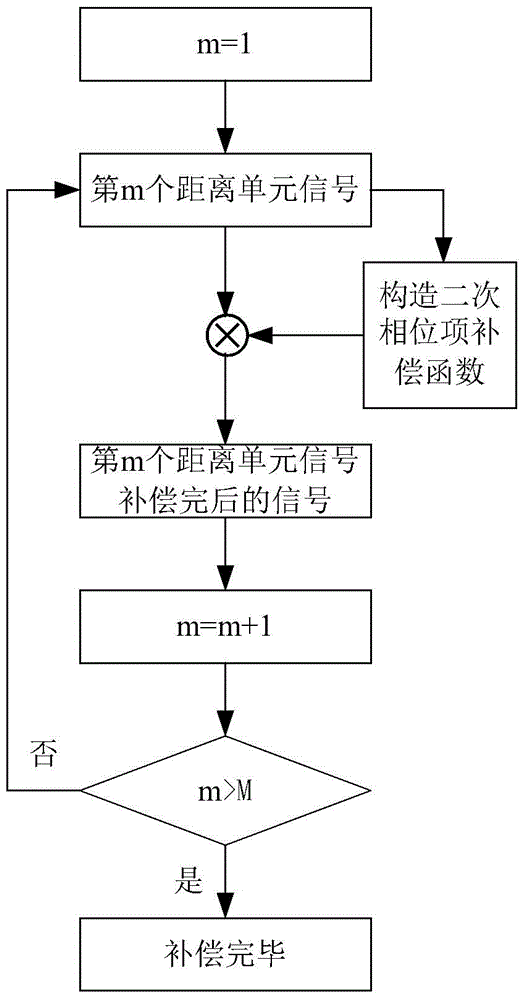
[0029] The method for estimating the effective rotation speed based on the principle of minimum entropy is first to perform distance compression and translation compensation (envelope alignment and self-focusing) on the imaging data, and secondly to perform Keystone transformation on the signal after self-focusing to correct the linear distance walk, and then determine The median value of the effective rotation speed, the search interval and the number of search points, and then use each effective rotation speed to be estimated to perform secondary phase item compensation on the Keystone transformed signal, and then perform azimuth imaging and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More