

Three-dimension reconstruction method and device, and mobile terminal
A three-dimensional reconstruction and three-dimensional technology, applied in the field of three-dimensional information, can solve the problems of failure to achieve three-dimensional reconstruction of objects, high cost, and no access to color information of objects, and achieve the effect of fast and all-round three-dimensional scanning and reconstruction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
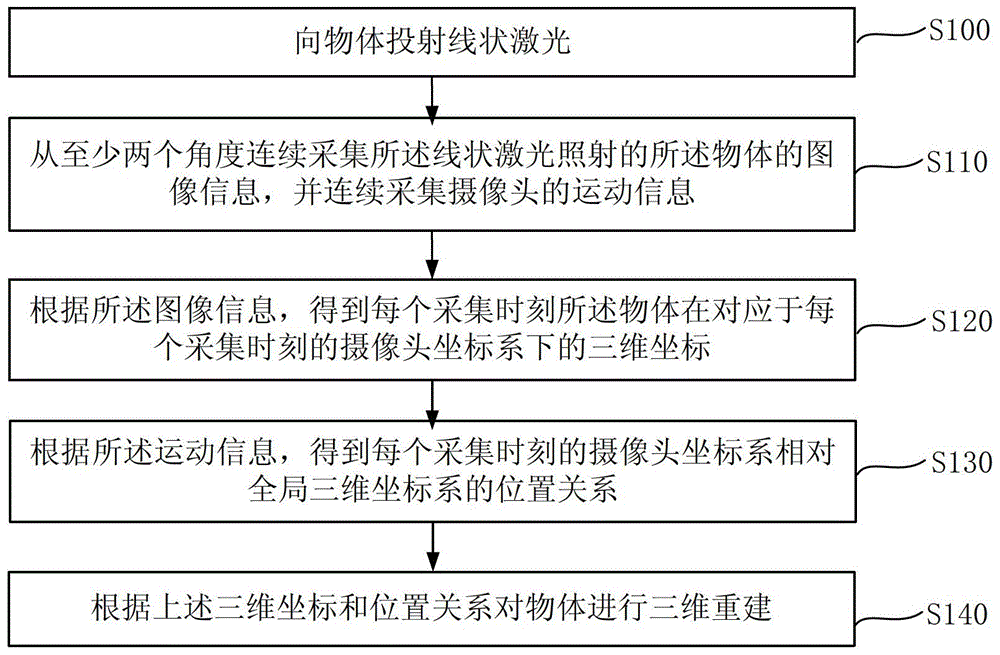
[0056] figure 1 It shows a flowchart of a three-dimensional reconstruction method provided by an embodiment of the present invention. Such as figure 1 As shown, the three-dimensional reconstruction method mainly includes:
[0057] Step S100, project a linear laser to the object;
[0058] Step S110: Continuously collect image information of the object irradiated by the linear laser from at least two angles, and continuously collect the motion information of the camera;
[0059] Step S120, according to the collected image information, obtain the three-dimensional coordinates of the object in the camera coordinate system corresponding to each collection time at each collection time;
[0060] Step S130: Obtain the positional relationship of the camera coordinate system relative to the global three-dimensional coordinate system at each collection time according to the collected motion information; and
[0061] Step S140: Perform three-dimensional reconstruction of the object according to ...
Embodiment 2
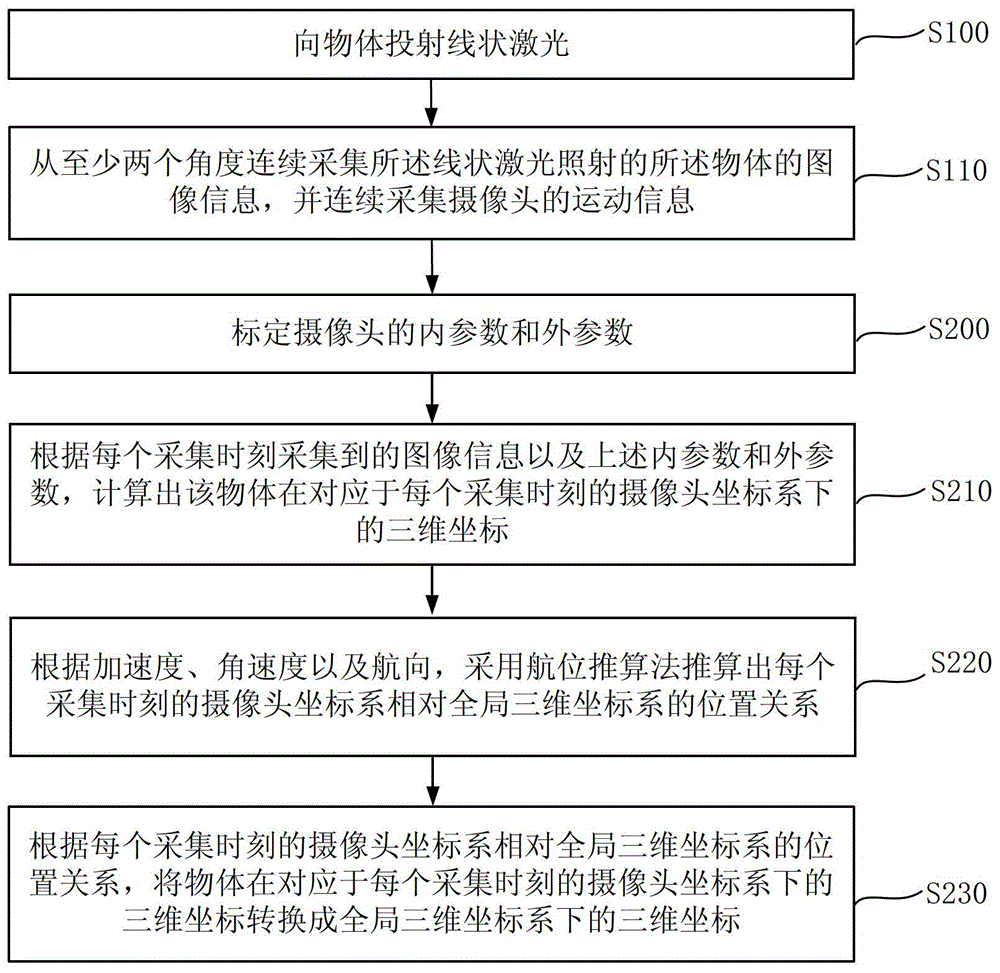
[0067] figure 2 It shows a flowchart of a three-dimensional reconstruction method provided by another embodiment of the present invention. figure 2 versus figure 1 Steps with the same label have the same meaning, such as figure 2 As shown, the main difference between this embodiment and the previous embodiment is that according to the collected image information, the object at each collection time is obtained before the three-dimensional coordinates in the camera coordinate system corresponding to each collection time. Methods also include:
[0068] Step S200: Calibrate the internal parameters and external parameters of the camera.
[0069] Correspondingly, obtaining the three-dimensional coordinates of the object in the camera coordinate system corresponding to each collection time at each collection time according to the collected image information may specifically include:
[0070] Step S210: Calculate the three-dimensional coordinates of the object in the camera coordinate sy...
Embodiment 3
[0112] image 3 It shows a flowchart of a three-dimensional reconstruction method provided by another embodiment of the present invention. image 3 versus figure 1 , figure 2 Steps with the same label have the same meaning, such as image 3 As shown, the main difference between this embodiment and the previous embodiment is that after the three-dimensional reconstruction of the object according to the three-dimensional coordinates and the position relationship, the method further includes:
[0113] Step S240: Calculate the relative relationship between the coordinate systems of the cameras at different collection moments, and establish the mapping relationship between the image information of the object at different collection moments according to the relative relationship.
[0114] Specifically, such as Figure 4 As shown, according to the above step S220, a continuous camera coordinate system sequence can be obtained, that is, the relative position relationship of the camera coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More