

Urban streetscape 3D reconstruction method and system based on unmanned aerial vehicle and edge vehicle cooperation
A drone and urban technology, applied in the field of geographic information, can solve problems such as the inability to collect surface texture information of objects, complex lidar operation, and excessive weight of lidar range finders, so as to improve data acquisition and 3D reconstruction efficiency, Fast 3D reconstruction and iterative updates, reducing computational load and dependencies
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
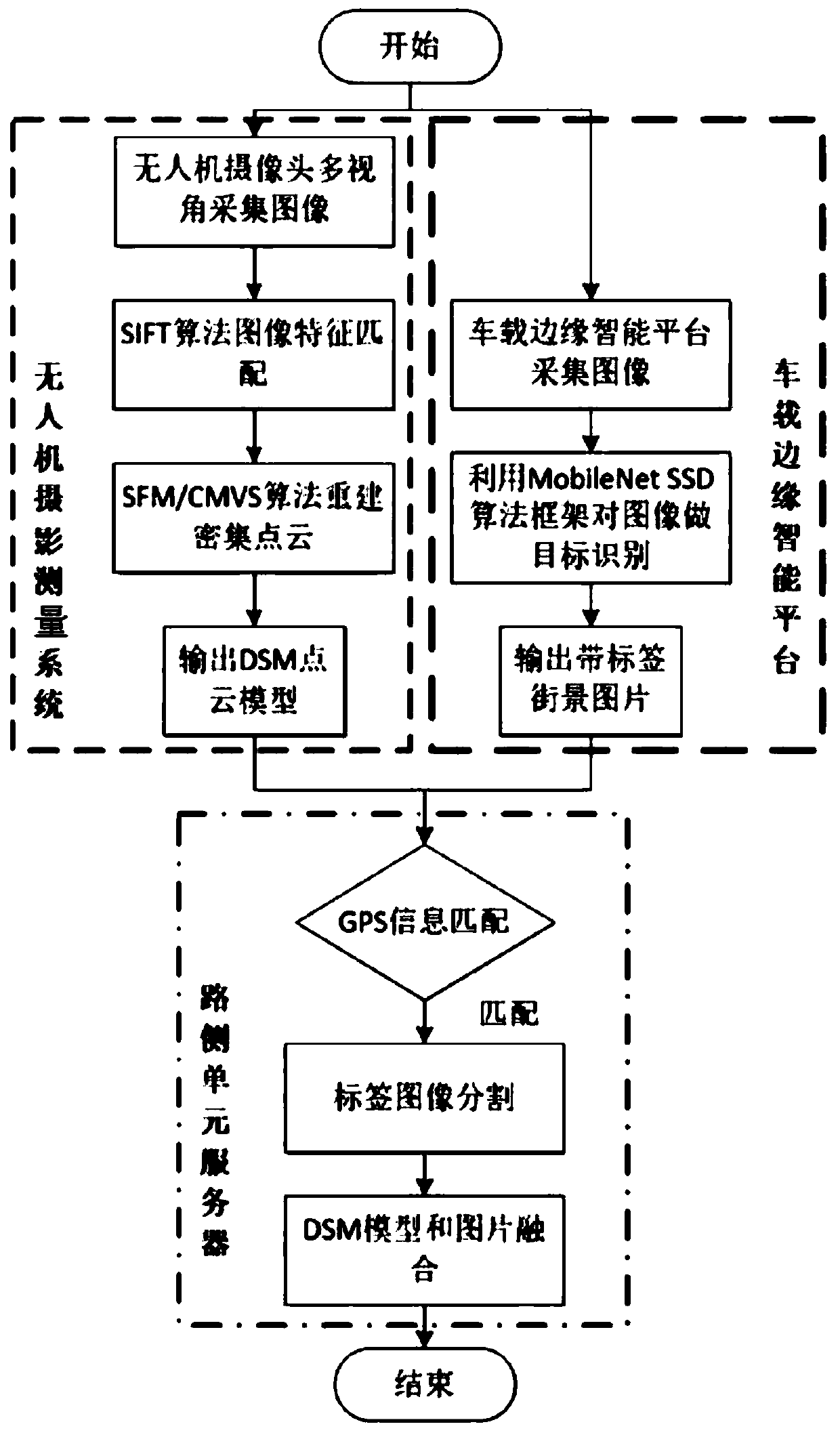
[0055] This embodiment provides a 3D urban street scene reconstruction method based on the coordination of drones and edge vehicles, such as figure 1 , including the following steps:
[0056] Use the camera mounted on the UAV to collect two-dimensional images of different perspectives of urban street scenes from different locations, and record the geographical location information along the way, use the GPU acceleration unit to generate a three-dimensional dense point cloud DSM model based on the two-dimensional images, and convert the three-dimensional dense point cloud The DSM model is output to the drive test unit server;
[0057] Use the camera mounted on the vehicle to collect image data of the city street view along the way, and record the geographic location information along the way, package the image data and geographic location information into a label image and output it to the drive test unit server;
[0058] The roadside unit server performs semantic segmentatio...
Embodiment 2
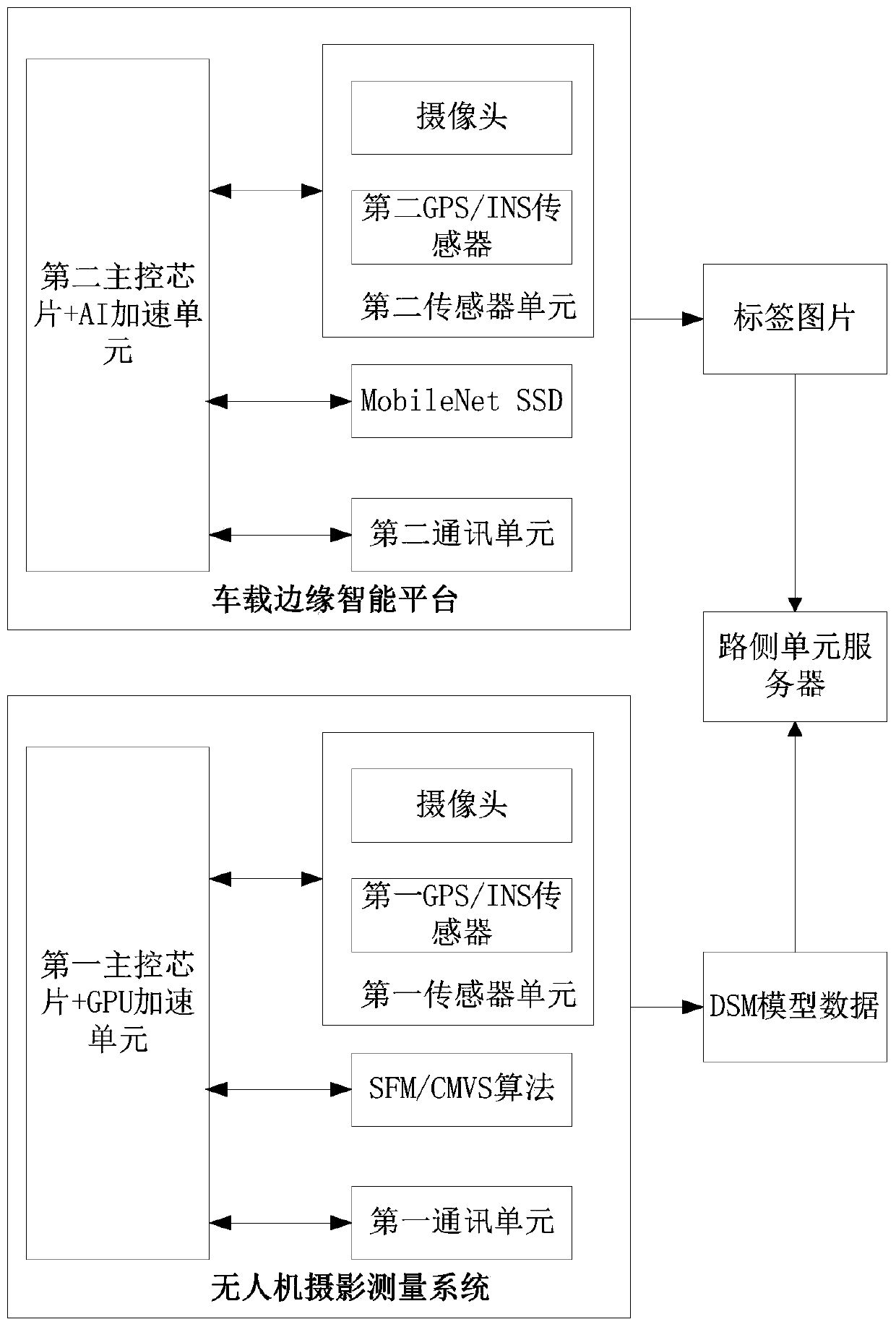
[0071] This embodiment provides a 3D urban street scene reconstruction system based on unmanned aerial vehicles and edge vehicles, such as figure 2 , including UAV photogrammetry system, vehicle-mounted edge intelligence platform and roadside unit server, among which:
[0072] The UAV photogrammetry system includes a UAV and a first main control chip, a GPU acceleration unit, a first sensor unit and a first communication unit on the UAV, and the main control chip receives different data collected by the sensor unit. The position collects two-dimensional images of different perspectives of the city street scene, and then controls the navigation and patrol route of the drone. The GPU unit generates a three-dimensional dense point cloud DSM model according to the two-dimensional image, and outputs the three-dimensional dense point cloud DSM model through the communication unit. to the drive test unit server;
[0073] The vehicle-mounted edge intelligence platform includes a fir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More