

Active stiffness-variable long-arm type bionic soft robot
A robotic and variable technology, applied in the field of robotics, can solve the problems that the rigidity cannot be independently variable and dynamically controllable, and achieve the effect of maintaining grasping action, good softness and bending, and stable grasping action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings.
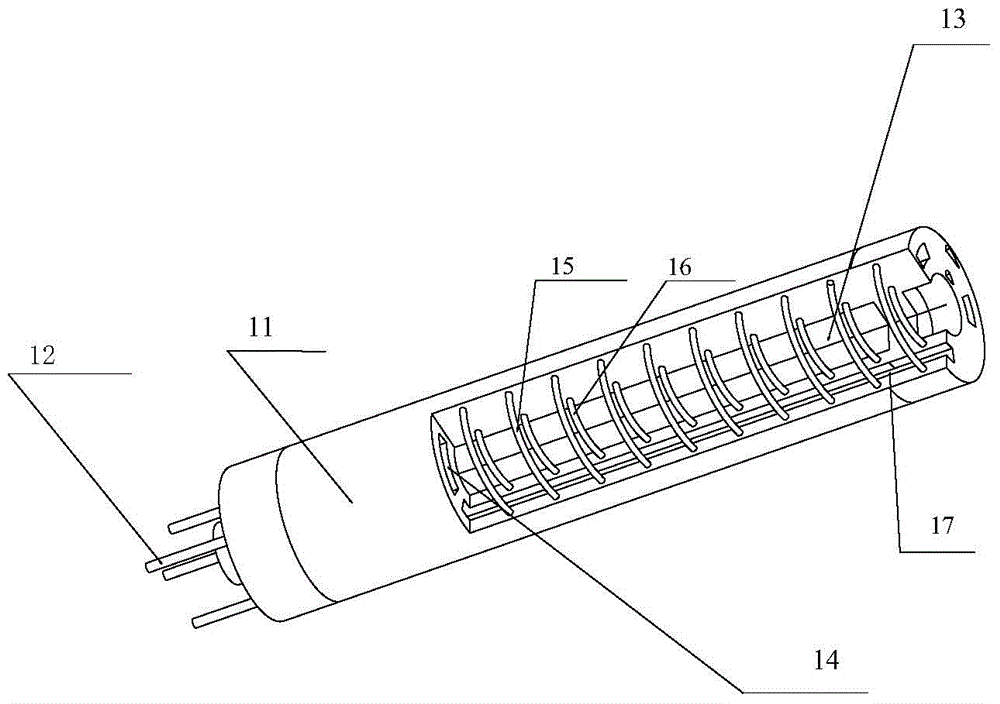
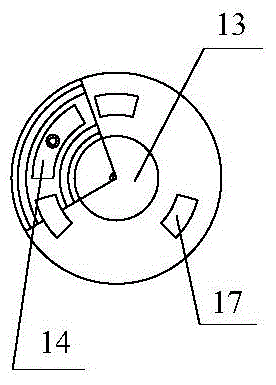
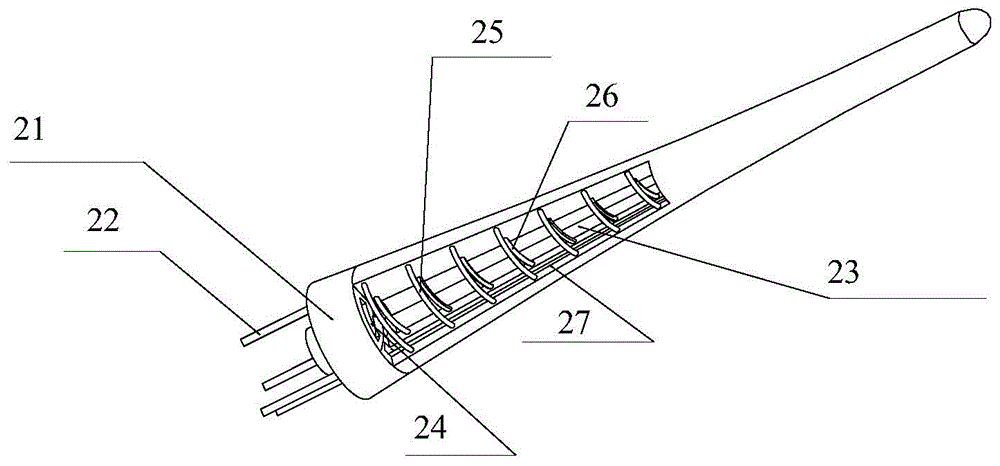
[0026] refer to Figure 1 to Figure 6 , an active variable stiffness long-arm bionic soft robot, comprising a base joint 1 and a tail joint 2, the rear end of the base joint 1 is connected to the front end of the tail knot 2, and the base joint 1 includes a first elastic The base body 11, the first ventilation pipe 12, the first central drive cavity 14 and the first side drive cavity 13, the first elastic base body 11 is cylindrical, and the middle part of the first elastic base body 11 is provided with a first central drive cavity 14. At least three first side drive cavities 13 are arranged at equal arc intervals on a circle of the elastic matrix outside the first central drive cavity 14, and the first central drive cavity 14 and the first side drive cavity Both ends of 13 are closed, and the first central driving cavity 14 and the first side driving cavity 13 are al...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More