

Jellyfish imitating underwater propelling device driven by embedded flexible joints
A technology of flexible joints and propulsion devices, which is applied to water-action propulsion components, ship propulsion, propulsion components, etc., and can solve problems such as limited motion control accuracy, low propulsion efficiency, and low system integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Example Embodiment
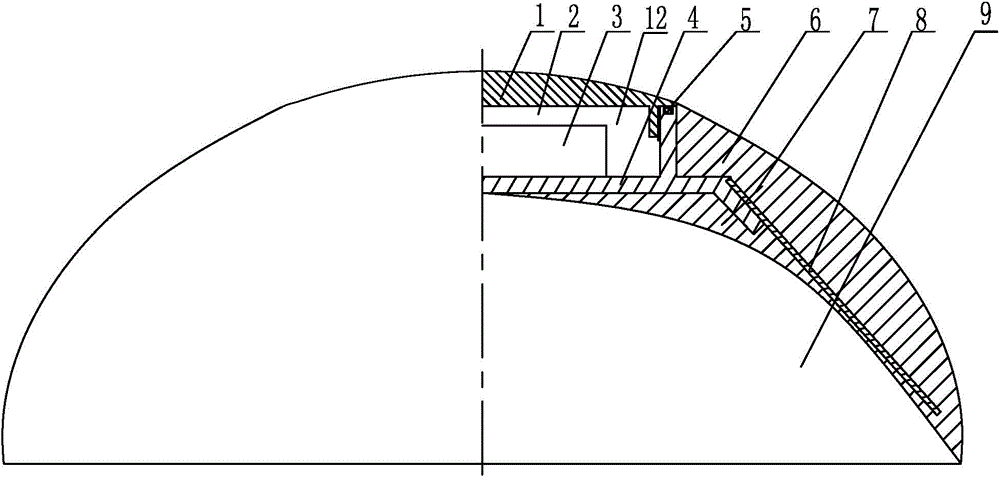
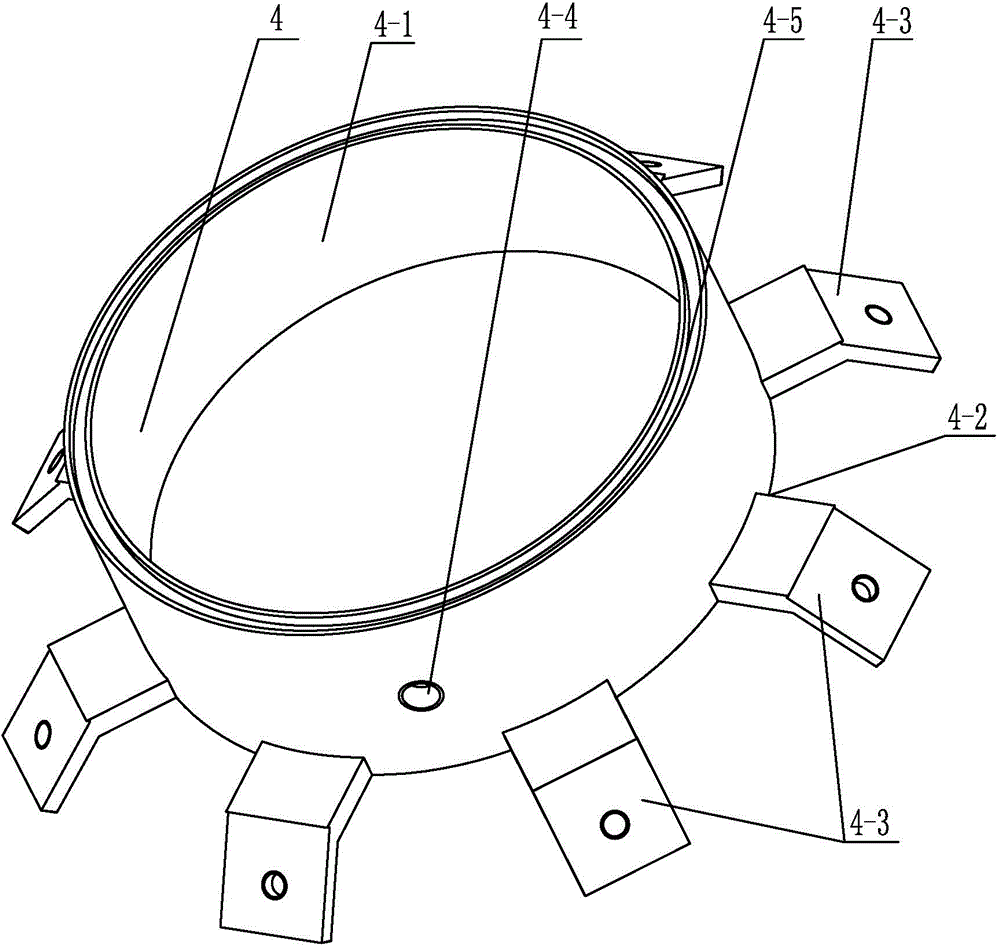
[0014] Specific implementation mode 1: Combination Figure 1-Figure 6 Explain that the imitation jellyfish underwater propulsion device driven by the embedded flexible joint of this embodiment includes a power and control module 3, and it also includes an abdominal cavity end cover 1, a bionic flexible body 6, an abdominal cavity base 4, and N flexible piezoelectric fibers The composite material drives the joint 8, and the outer edge of the abdominal cavity base 4 is processed with N tentacles 4-3, where N is a positive integer and N≥8;
[0015] The outer contour of the bionic flexible body 6 is hemispherical, and N flexible piezoelectric fiber composite drive joints 8 are evenly embedded in the side wall surface of the bionic flexible body 6 along its circumferential direction. The abdominal cavity base 4 is embedded in the bionic flexible body 9 At the bottom, the open end of the abdominal cavity end cap 1 is closed on the open end of the abdominal cavity base 4 and the two are...
Example Embodiment
[0017] Specific implementation manner two: combination figure 1 It is explained that the bionic flexible body 6 of this embodiment is made of silica gel. With this setting, the chemical properties are stable and the mechanical strength is high, which meets the design requirements and actual needs. Others are the same as the first embodiment.
Example Embodiment
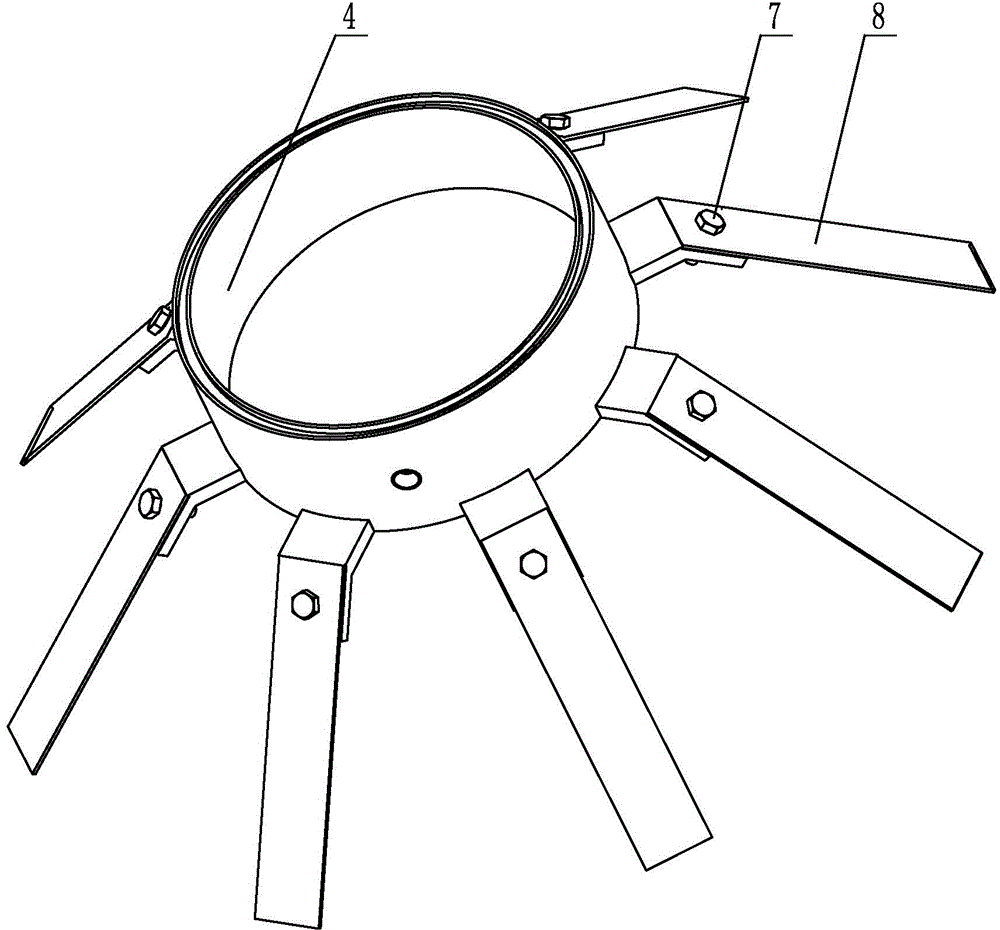
[0018] Specific implementation mode three: combination image 3 Note that the number of flexible piezoelectric fiber composite material-driven joints 8 in this embodiment is eight. This setting meets the design requirements and actual underwater propulsion needs. Others are the same as the first or second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More