

SEMG-based single joint active training control method and corresponded rehabilitation robot
A rehabilitation robot and active training technology, applied in the field of rehabilitation medicine, can solve the problem that rehabilitation training equipment and methods are difficult to adapt to autonomous limb control, and achieve the effect of improving rehabilitation efficiency and improving training enthusiasm.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The sEMG-based single-joint active training control method proposed by the present invention is used in a rehabilitation robot with a sEMG acquisition system. The rehabilitation robot has a controller and a driver for receiving computer instructions and controlling the motion and force output of the kinematic mechanism. Since the control of the rehabilitation robot belongs to the prior art, it will not be described in detail here.
[0027] Specifically, the method of the present invention mainly comprises the following steps:
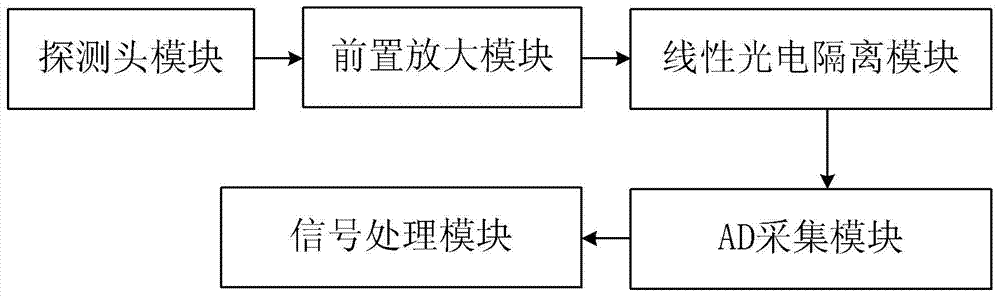
[0028] S1. The sEMG acquisition system acquires the sEMG signal of the patient;
[0029] In the step S1, the sEMG acquisition system usually also needs to acquire the patient's muscle resting sEMG signal and the sEMG signal in the state of maximum voluntary contraction), and use the sEMG signal in these two states to perform an operation on all the sEMG signals collected. Normalized.
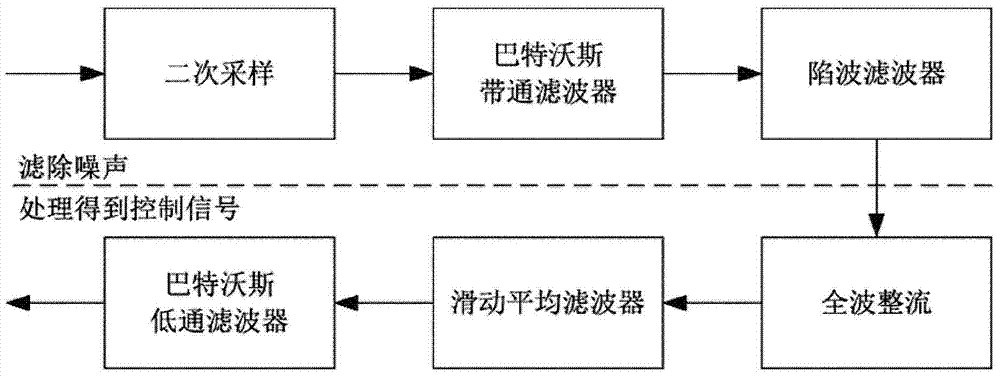
[0030] S2. Converting the sEMG signal into a single-joint a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More