

Intelligent three-dimensional flexible grabbing transferring mechanism
A transfer mechanism and flexible technology, applied in the direction of conveyor objects, transportation and packaging, etc., can solve the problems of position deviation and unfixed position of the workpiece, and achieve the effect of compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
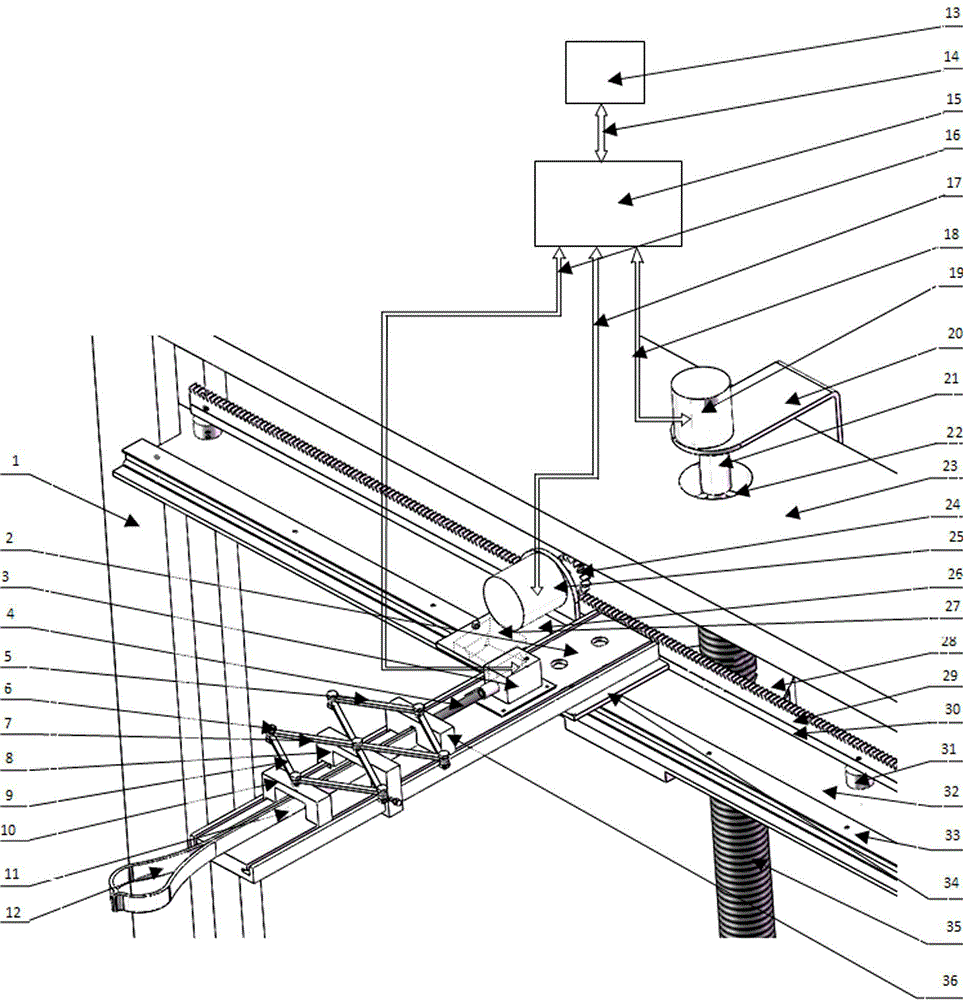
[0018] refer to figure 1 , an intelligent three-dimensional flexible grasping transmission mechanism of the present invention is composed of a mechanical part and a control part connected thereto, wherein:
[0019] The mechanical part consists of vertical frame 1, fixed table 2, hollow shaft stepping motor 3, horizontal screw 4, rear short connecting rod 5, connecting bolt 6, long connecting rod 7, fixed card 8, front short connecting rod 9, slide card 10 , spring 11, handle 12, vertical stepper motor 19, vertical stepper motor bracket 20, coupling 21, bearing 22, horizontal frame 23, gear 24, horizontal stepper motor 25, horizontal stepper motor bracket 26, horizontal Mobile slider 27, nut sleeve frame 28, tooth rack 29, rack pole 30, spacer 31, support platform 32, support plate 34, rear fixed card 36, horizontal moving slide rail 33 and vertical screw rod 35, mainly complete the flexible Functions such as grabbing, horizontal movement and up and down movement;
[0020] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More